Как известно, в крановых механизмах находят применение как системы контакторно-релейного управления, так и системы непрерывного управления. В системах контакторно-релейного управления крановыми двигателями применяют силовые и магнитные контроллеры. Согласно [1, табл. 5.1] для легкого режима работы вне зависимости от мощности выбранного двигателя применяются контроллеры типа К.
Магнитные контроллеры применяются при большой производительности крана и тяжелых условий работы. В нашем случае целесообразно применять силовые кулачковые контроллеры. Они предназначены для управления как двигателями постоянного тока, так и асинхронными двигателями и относятся к категории аппаратов непосредственного ручного управления.
В нашем случае используем контроллеры серии ККТ-60А, которые предназначены для пуска, реверсирования и регулирования скорости вращения асинхронных двигателей серии МТ путем изменения схемы и величины включенных в электрическую цепь сопротивлений. По условиям эксплуатации и назначению контроллеры относятся к категориям АС-2, АС-3, АС-4 по ГОСТ 12434. Каждый контроллер имеет 12 электрических цепей. Климатические исполнения: У2, УХЛ2, Т2. Степень защиты IP40. Контроллеры применяются только в цепях переменного тока. Охлаждение естественное.
Для механизмов подъема и механизма передвижения тележки применяем кулачковые контроллеры серии ККТ-61А. Максимальный допустимый ток данного типа контроллера составляет 100 А.
Для механизма передвижения моста выбираем кулачковые контроллеры серии ККТ-68А. Максимальный допустимый тока составляет 150 А.
Масса выбранных контроллеров составляет 12,5 кг. Число ступеней (положений) вперед/назад составляет 5/5.
Крановые защитные панели предназначены для максимальной токовой защиты, нулевой защиты, конечной защиты (в сочетании с конечными выключателями) и нулевой блокировки.
Защитные панели не применяют для тех типов магнитных контроллеров, которые имеют собственные защиты.
Основными элементами защитной панели являются: линейный контактор для обеспечения нулевой защиты и автоматического размыкания цепи при срабатывании любого вида защиты; максимальные реле – для защиты цепей отдельных электроприводов, общий рубильник питания крана, кнопка включения, пакетный переключатель цепей управления.
Так как суммарная мощность приводов не превышает 125 кВт, то в кабине управления устанавливают ящик типа Я8901 с линейным контактором на 160 – 250 А и группой реле защит. От ящика Я8901 получают питание отдельные электроприводы крана.
Таким образом, все силовые цепи крана защищаются двумя специальными устройствами: ящиком с автоматическим выключателем и ящиком линейного контактора, а также линейными контакторами самих контроллеров.
Все мостовые краны оснащаются рабочим местом машиниста крана – пультом управления. Пульт управления представляет собой рабочее кресло, справа и слева от кресла установлены колонки управления, в которых размещаются по два контроллера управления, необходимые приборы, сигнальные лампы, кнопки и т.д.
В пультах дистанционного управления крановыми приводами используются командоконтроллеры серии ККП 1000 (контактный) и ККП 1423 (бесконтактный).
При расчете пусковых сопротивлений с использованием семейства универсальных характеристик строят необходимую диаграмму пуска двигателя исходя из относительных значений максимального момента переключений, числа ступеней пуска и момента статической нагрузки.
Число ступеней пускового сопротивления определяется конструкцией и схемой выбранного силового контроллера. В нашем случае выбранные контроллеры имеют 5 ступеней. При этом включение ступеней симметричное на каждую фазу.
Скорость идеального холостого хода:
 (6.1)
(6.1)
Номинальное скольжение:
 (6.2)
(6.2)
Номинальный ток и напряжение ротора (табл. 3) соответственно равны Ip = 56 A, Up = 241 B.
Номинальное сопротивление фазы ротора:
 (6.3)
(6.3)
Сопротивление одной фазы обмотки ротора:
![]() (6.4)
(6.4)
Отношение максимального момента пуска М2 к минимальному М1:
 (6.5)
(6.5)
Сопротивления ступеней:
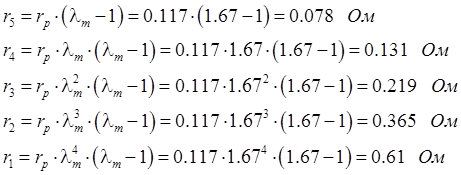 (6.6)
(6.6)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.