![]()
![]() Солнца
Солнца
 |
|||
![]()
![]()
 Сигнал
Сигнал
![]() Солнца
Солнца
![]()
![]()
![]() Сигнал
Сигнал
![]() Земли
Земли
![]()
![]()
![]() Сигнал
Сигнал
![]() Луны
Луны
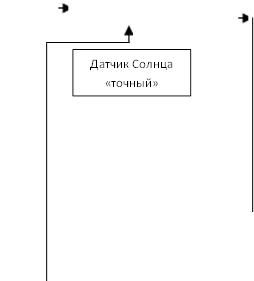
Рисунок 9. 15 – Функциональная схема системы ориентации лунной станции
В качестве опорных ориентиров для станции были выбраны Солнце, Луна, Земля. Солнце и Луна использовались большую часть времени. На заключительном этапе, когда Луна стала близкой и большой, использовалась Земля. Опорные направления определялись с помощью фотоэлектрических датчиков. Кроме того, в систему ориентации входили скоростные гироскопы – датчики угловых скоростей. Угол обзора грубого датчика достаточно широкий (около 190о), что гарантирует «захват Солнца». Затем при полете начинается поиск Луны. Для этого КА сообщается вращательное движение относительно направления на Солнце. Вращение прекращается после попадания Луны в поле зрения лунного датчика. Так как угол Солнце-станция-Луна меняется в течение полета, то предусматривается автоматическая отработка этого изменения поворотом солнечного датчика с помощью шагового электродвигателя. Ошибка системы ориентации станции не превышает (2÷3)΄.
В конечном итоге, функции систем управления любого КА сводятся к тому, чтобы, во-первых, обеспечить начальное «успокоение» аппарата после его отделения от ракеты-носителя (сведение к минимуму угловой скорости вращения, полученной КА в момент отделения), и, во-вторых, обеспечить соответствующие программные повороты КА вокруг трех взаимно ортогональных строительных осей, жестко связанных с центром масс. Система управления должна, кроме того, иметь возможность осуществлять поиск специальных ориентиров (Земли, Луны, Солнца, планет Солнечной системы, звезд) и обеспечивать стабилизацию космического аппарата относительно этих ориентиров с точностью, необходимой для работы бортовых аппаратов и научных приборов. В функцию системы управления самим ЛА также входит стабилизация космического летательного аппарата по заданному курсу и автоматическое управление реактивными двигателями для изменения траектории центра масс и маневрирования кораблем.
39. При управлении движением центра масс КА основное значение имеет неавтономное корректирующее радиоуправление. Такое управление осуществляется как командное радиоуправление I-типа (КРУ-I). В последнее время для управления космическими кораблями все большее применение получает также автономное корректирующее радиоуправление. При стыковке КА используется самонаведение и наведение «на себя» (КРУ-III).
Отличительной чертой корректирующего управления является разнесение во времени процессов контроля траектории КА и изменения ее параметров. При этом контроль производится в течение длительного времени орбитального полета, а коррекция траектории за малое время движения на активном участке. В тех случаях, когда в течение достаточно длительного времени происходят быстрые непредсказуемые изменения действующих на КА сил, вместо корректирующего целесообразнее использовать следящее радиоуправление. В основном оно применяется на заключительных (терминальных) участках, например, при мягкой посадке на поверхность или при стыковке КА.
При корректирующем командном радиоуправлении с наземного пункта измерение параметров движения КА может осуществляться не только на земле, но и на борту КА, что соответствует командному управлению КРУ-II. В этом случае результаты измерений должны передаваться на Землю. При удалении от Земли и приближении к цели точность измерений с КП падает, а точность измерений, проведенных на борту, возрастает.
 |
|||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Командная радиосистема
Командная радиосистема
 Ключ 1
Ключ 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.