Мета: Вивчення критеріїв стійкості. Освоєння методики
дос-лідження стійкості лінійної САУ на ПЭВМ із використанням пакетів СС і SIAM.
1.
Методичні вказівки по виконанню роботи
1.1.
Система автоматичного управління називається стійкою, якщо перехідний процес,
викликаний зміною тих чи інших зовнішніх впливів, з часом загасає, тобто.
Для
того, щоб лінійна САУ була стійка, необхідно і досить, щоб речовинні частини
всіх коренів характеристичного рівняння САУ були негативні, тобто .
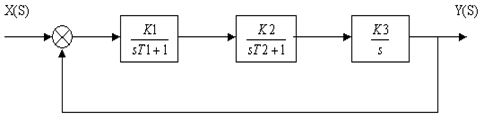
Розглянемо
систему, структурна схема якої представлена на рис.4.1.
Рис. 4.1.
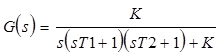
Передаточна
функція замкнутої системи має вид:
де K = K1 * K2 * K3 -
загальний коефіцієнт підсилення розімкнутої системи.
Характеристичне рівняння
системи має вид:
T1 T2 S3 +
(T1 + T2) S + S + K = 0
Умова стійкості визначається
співвідношенням:
(T1 + T2) – T1
T2 K > 0
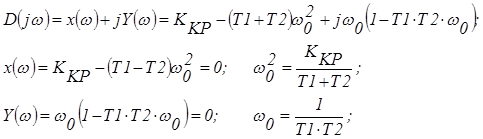
Критичний коефіцієнт
підсилення визначається залежністю:
Частота власних коливань
визначається за співвідношення:
Для аналізу стійкості
аналогових і дискретних систем у пакеті СС використовується програма STABILITY,
при цьому вихідні дані задаються у вигляді передаточної функції розімкнутої
системи. Програма унітарна, тобто діалог відсутній.
Запис:
CC > STAB, G1 ß
Результатом виконання
програми є:
-
структурна схема замкнутої системи;
-
характеристичний поліном;
-
значення коренів характеристичного рівняння;
-
висновок про стійкість системи.
Програма
ROUTM - дозволяє визначити
область стійкості безупинних і дискретних систем при зміні коефіцієнта
підсилення розімкнутого контуру.
Запис:
CC >
ROU, G1 ß
Результатом виконання
програми є:
-
структурна схема замкнутої системи;
-
діапазон зміни коефіцієнта підсилення розімкнутої системи при який система
стійка.
1.2. Побудова кореневих
годографів.
Програма
ROOT LOCUS дозволяє будувати
кореневі годографи аналогових і дискретних моделей при зміні
Вихідні дані задаються у
виді передаточної функції розімкнутої системи.
CC > ROOT ß
Enter transfer function Gn > G1 ß
(Введіть ім'я ПФ Gn)
Enter low real, high real, real divisions low imag, high
imag, imag divisions Auto for auto scaling)
> a ß
Уведіть параметри, що визначають границі графіка кореневих
годографів (6 параметрів)(при цьому передбачається альтернатива, що полягає в
автоматичному визначенні цих параметрів,-їй відповідає подкоманда а).
Enter title > G1 ß
(Найменування графіка)
Enter bасkground, foreground, step size > 0,0,1 ß
(Вид копій координатної сітки, вид ліній графіка, крок
висновку)
Після введення цієї
подкоманди на екран видається рішення. Крапки відзначені зірочками,
відповідають К = 0, при цьому полюса розімкнутої і замкнутої системи
збігаються.
ІІ. Порядок виконання роботи
2.1.
Ввійти в середовище пакета СС.
2.2.
Використовуючи значення постійних часу відповідно до заданого варіанта
(табл.4.1), расчитать критичний коефіцієнт підсилення і частоту власних
коливань систем.
2.3.
Використовуючи засобу пакета ввести передаточну функцію розімкнутої системи при
К= Ккр (відповідно до методики, викладеної в лабораторній роботі N1).
2.4.
Зняти перехідну функцію (відповідно до методики, викладеної в лабораторній
роботі №2).
2.5.
Переконатися в наявності сталих коливань, використовуючи курсор визначити
частоту власних коливань. Використовуючи команду ROUT визначити область
стійкості системи при зміні