2.3.
Перетворити передаточну функцію в дискретну форму використовуючи процедуру
CONVERT з параметром 8 (імпульсний елемент із фіксатором ) і часом квантування
Т=0.2с.
2.4.
Одержати перехідний процес досліджуваної замкнутої системи, використовуючи
команду DTIME.
2.5.
Використовуючи курсор, зафіксувати координати характерних крапок перехідної
функції необхідних для визначення показників якості системи.
2.6.
Змінюючи коеффициет посилення системи - K, за допомогою команди
CHANGE
побудувати сімейство перехідних функцій і визначити вплив параметрів
досліджуваної системи на показники якості.
2.7.
Побудувати кореневий годограф досліджуваної системи. Використовуючи команду
ROUT визначити область стійкості системи.
2.9.
Використовуючи команду STAB визначити корені характеристичного полінома і
визначити ступінь стійкості і колебательность системи.
2.10.
Ввійти в середовище пакета SIAM , увести сему моделі досліджуваної системи,
одержати перехідний процес і визначити показники якості.
ІІІ. Контрольні питання
3.1.
Дати визначення перехідної функції дискретної системи.
3.2.
Дати визначення функції ваги дискретної системи.
3.3.
Який зв'язок між перехідною й імпульсною характеристикою?
3.4.
Перелічити методи оцінки якості дискретних систем.
3.5.
Перелічити типові впливи.
3.6. Що
така якість процесів регулювання?
3.7
Перелічити основні показники якості перехідного процесу.
3.8.
Пояснити вплив параметрів досліджуваної САР на якість системи.
3.9. Що
таке прямі і непрямі методи оцінки якості САУ?
3.10.
Як впливає на якість перехідного процесу період квантування?
3.11.
Перелічити методи побудови перехідних процесів.
3.12.
Методи поліпшення якості перехідного процесу.
3.13.
Який перехідний процес називається монотонним?
3.14.
Які показники якості характеризують швидкодійність системи?
ЛАБОРАТОРНА РОБОТА №12
Тема:
Аналіз сталих помилок у дискретних САУ при типових впливах.
Мета:
Освоєння методики визначення сталих помилок у дискретних САУ при типових
впливах з використанням пакетів моделювання. Визначення впливу структури і
параметрів САУ на величину сталої помилки.
І. Методичні вказівки по виконанню роботи
Точність дискретних САУ оцінюється аналогічно,
як і безперервних, з урахуванням деяких особливостей.
Зображення
помилки для дискретної системи дорівнює

Значення
сталої помилки визначається за допомогою теореми про кінцеве значення
дискретної функції

При
визначенні помилок використовують типові впливи, дискретні перетворення Лапласа
для типових впливів мають вигляд:
- для впливу з
постійною амплітудою

- для впливу з
постійною швидкістю

- для впливу з
постійним прискоренням

Розглянемо помилки в дискретних системах. Помилки в системах управління можна
класифікувати як статичні, кінетичні і инерци-онные.
Статична
помилка - це помилка, що виникає в системі при одиничному впливу.

Кінетична
помилка - це помилка, що виникає в системі при
лінійно - зростаючого впливу.
Інерційна помилка - це помилка, що виникає в
системі при квадратичному впливу.
Розглянемо приклади розрахунку сталих помилок у дискретних системах.
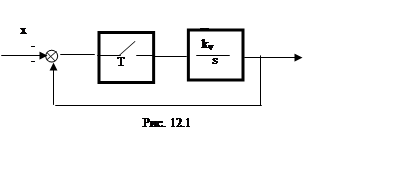
Приклад 1.
Для заданої системи (мал. 12.1) визначимо сталі поми-лки.
Рішення: Визначимо вираження для сталих помилок.
1. Статична помилка

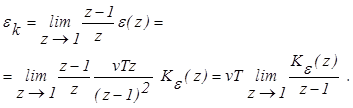
2. Кінетична
помилка

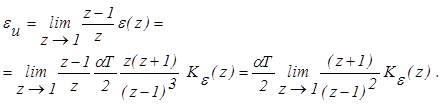
3. Інерційна
помилка

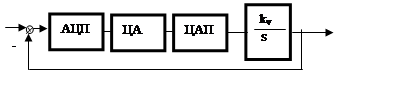
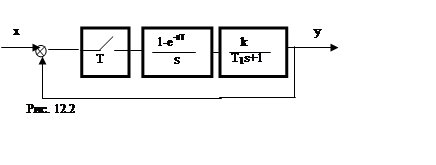 Приклад 2. Для заданої системи (мал. 9.2) визначити сталі
поми-лки.
Приклад 2. Для заданої системи (мал. 9.2) визначити сталі
поми-лки.
Рішення:
1. Визначимо
передатну функцію розімкнутої системи
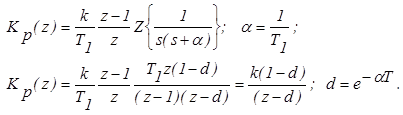
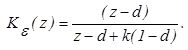
2. Визначимо
передатну функцію системи помилково
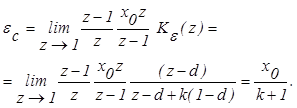
3. Визначимо
статичну помилку
4. Визначимо
кінетичну помилку
Приклад 3.
Для заданої системи (мал. 12.3) розрахувати сталі помилки, якщо алгоритм
функціонування цифрової частини описується рівнянням:

x y
Рис.12.3