![]() - уставки переключения структуры
регулятора мощности.
- уставки переключения структуры
регулятора мощности.
При улучшении переходных процессов, вызываемых увеличением заданных частоты вращения вала и мощности ДГ, необходимо принимать следующие условия:
- цикловая
подача топлива в цилиндры дизеля не должна превышать допустимо величины,
вычисляемой с учетом давления ![]() , температуры
, температуры ![]() , наддувочного воздуха и заданного
коэффициента избытка воздуха
, наддувочного воздуха и заданного
коэффициента избытка воздуха ![]() :
:
 ,
(4.13)
,
(4.13)
где ![]() - коэффициент пропорциональности;
- коэффициент пропорциональности;
- угловое ускорение коленчатого вала дизеля должно соответствовать условию:
 ,
(4.14)
,
(4.14)
где ![]() - допустимая величина углового
ускорения, определенная условием прочности коленчатого вала дизеля;
- допустимая величина углового
ускорения, определенная условием прочности коленчатого вала дизеля;
- темп увеличения мощности нагрузки генератора должен соответствовать условию:
 ,
(4.15)
,
(4.15)
где ![]() - заданная допустимая величина темпа
увеличения мощности нагрузки генератора.
- заданная допустимая величина темпа
увеличения мощности нагрузки генератора.
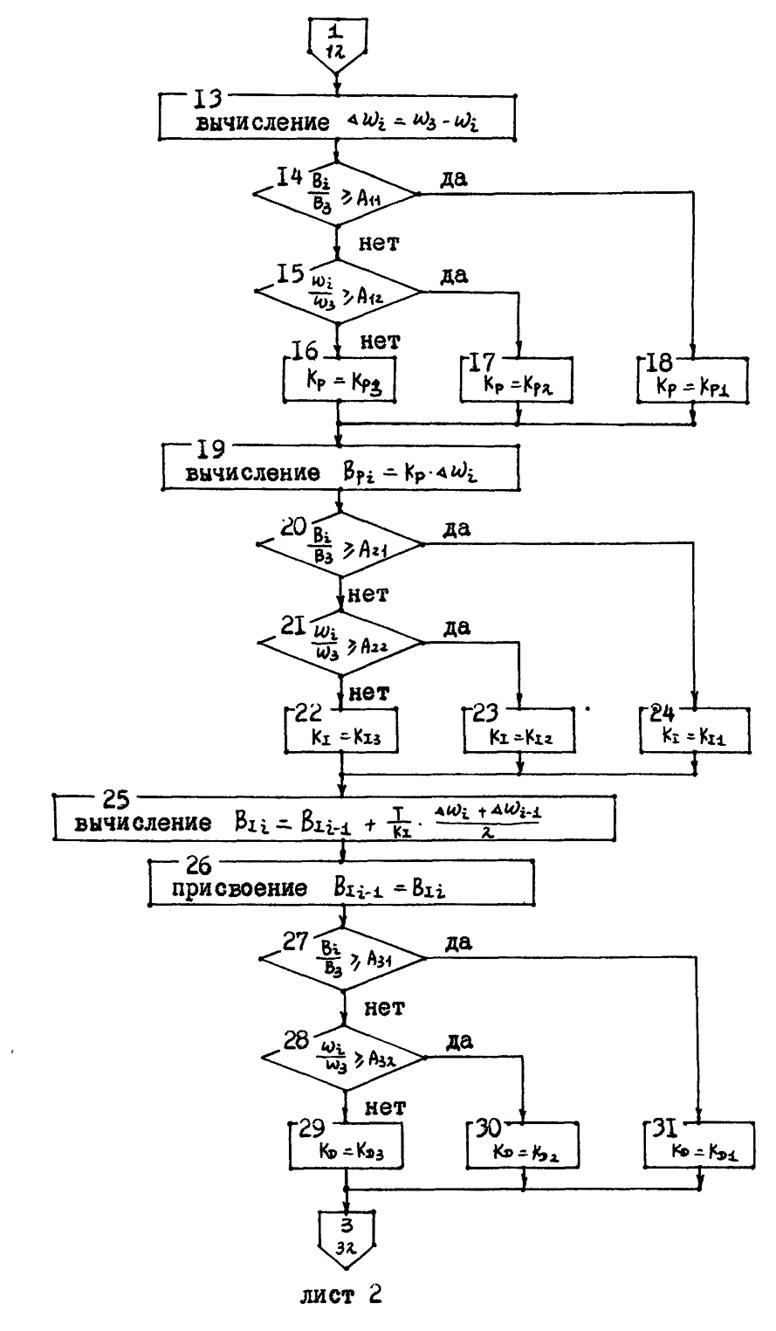
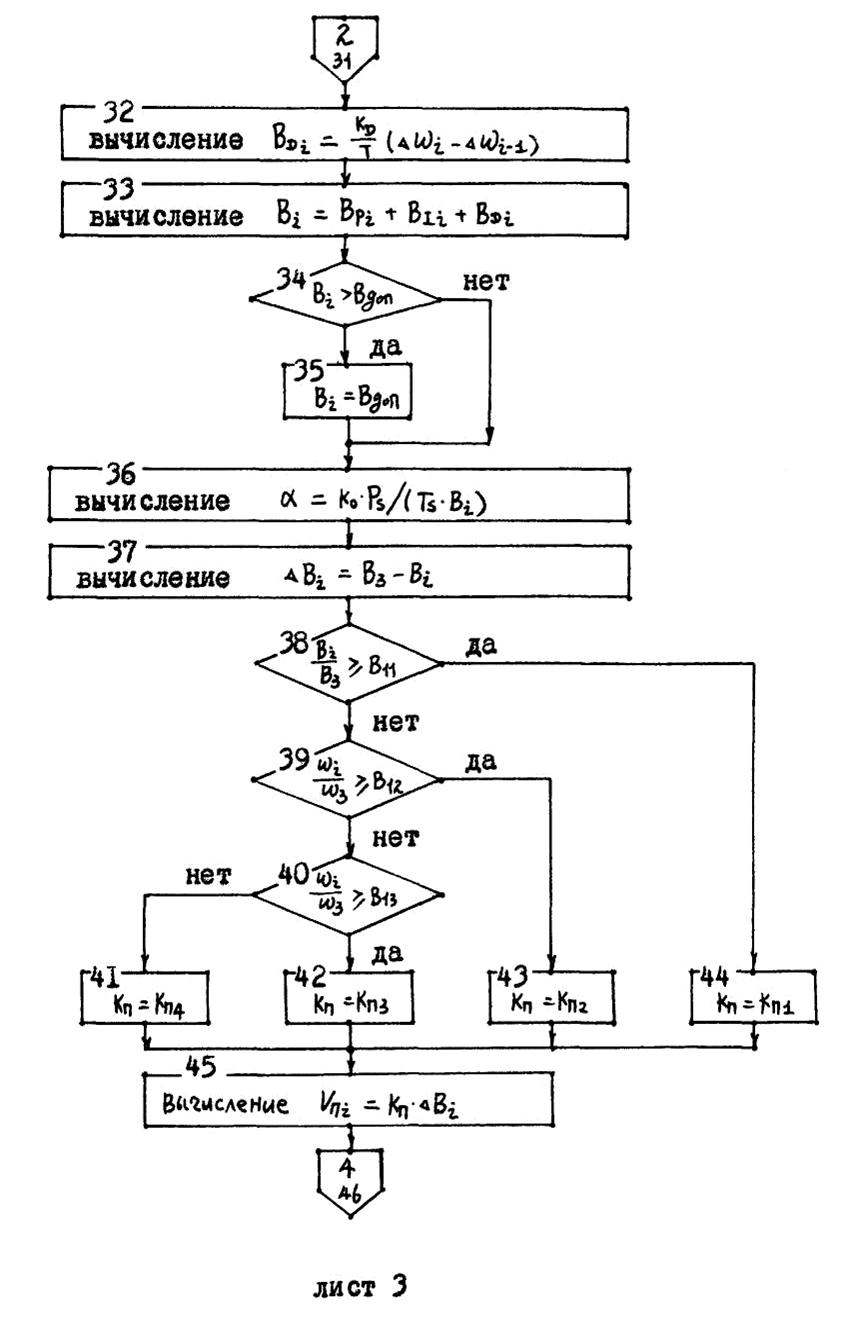
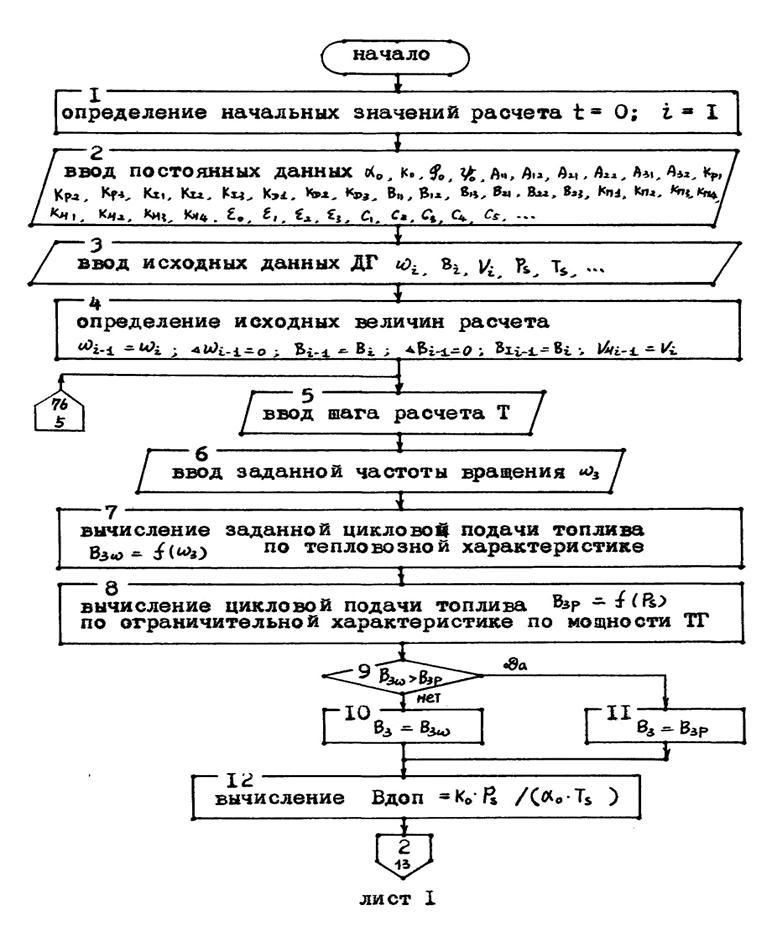
Алгоритмы расчета переходного процесса ДГ представлены на рис.4.1. В блоки 1-4 вводятся исходные величины.
В блоках 6-11
определяется заданный режим работы ДГ тепловоза. В блоке 12 вычисляется максимальная
допустимая цикловая подача топлива ![]() .
.
В блоках 13-33 определяется управляющее воздействие регулятора частоты вращения. В блоках 34-35 определяется допустимая величина цикловой подачи топлива.
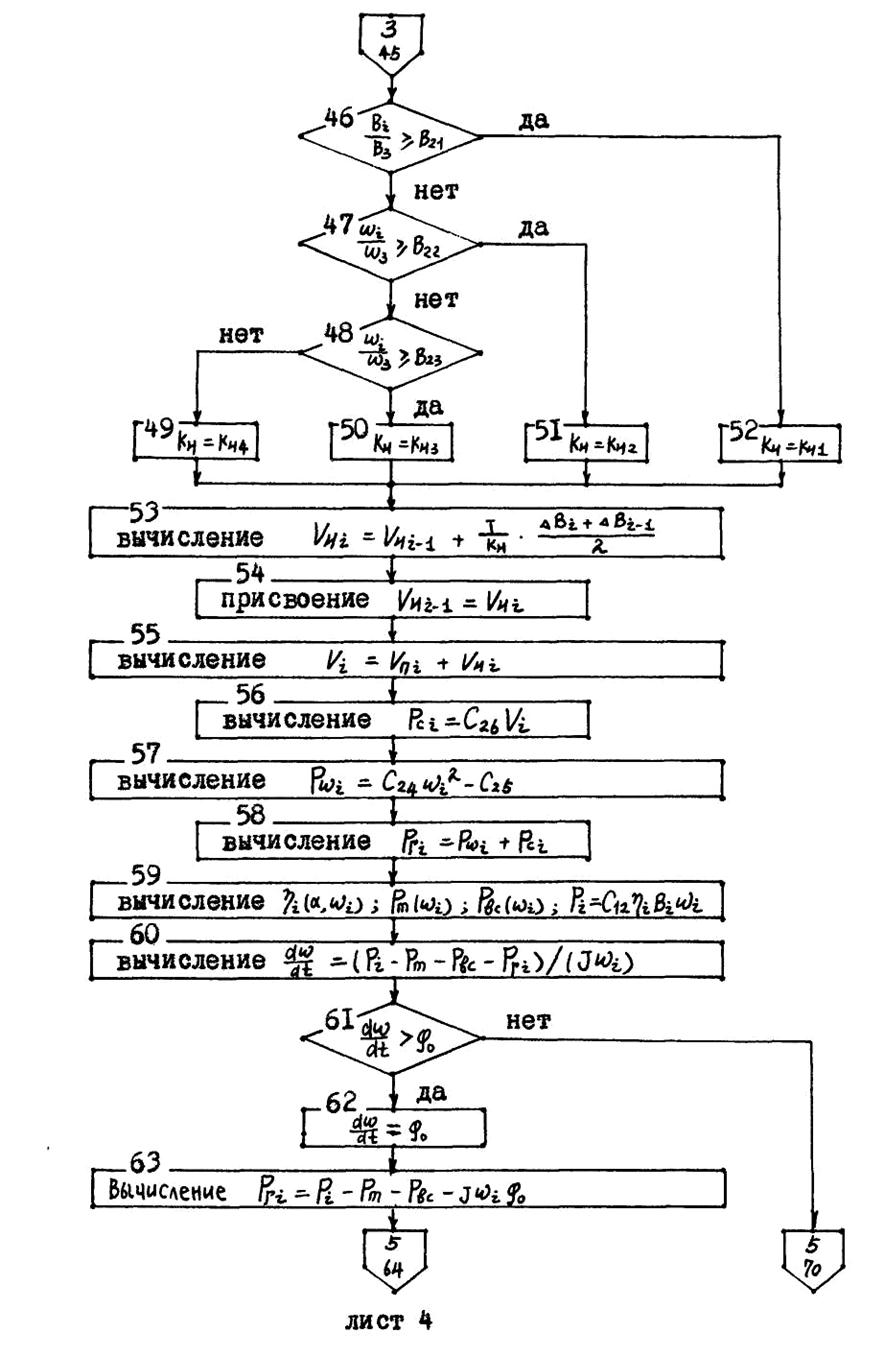
В блоках 37-55 вычисляется управляющее воздействие регулятора мощности.
В блоках 56-58 вычисляется мощность генератора.
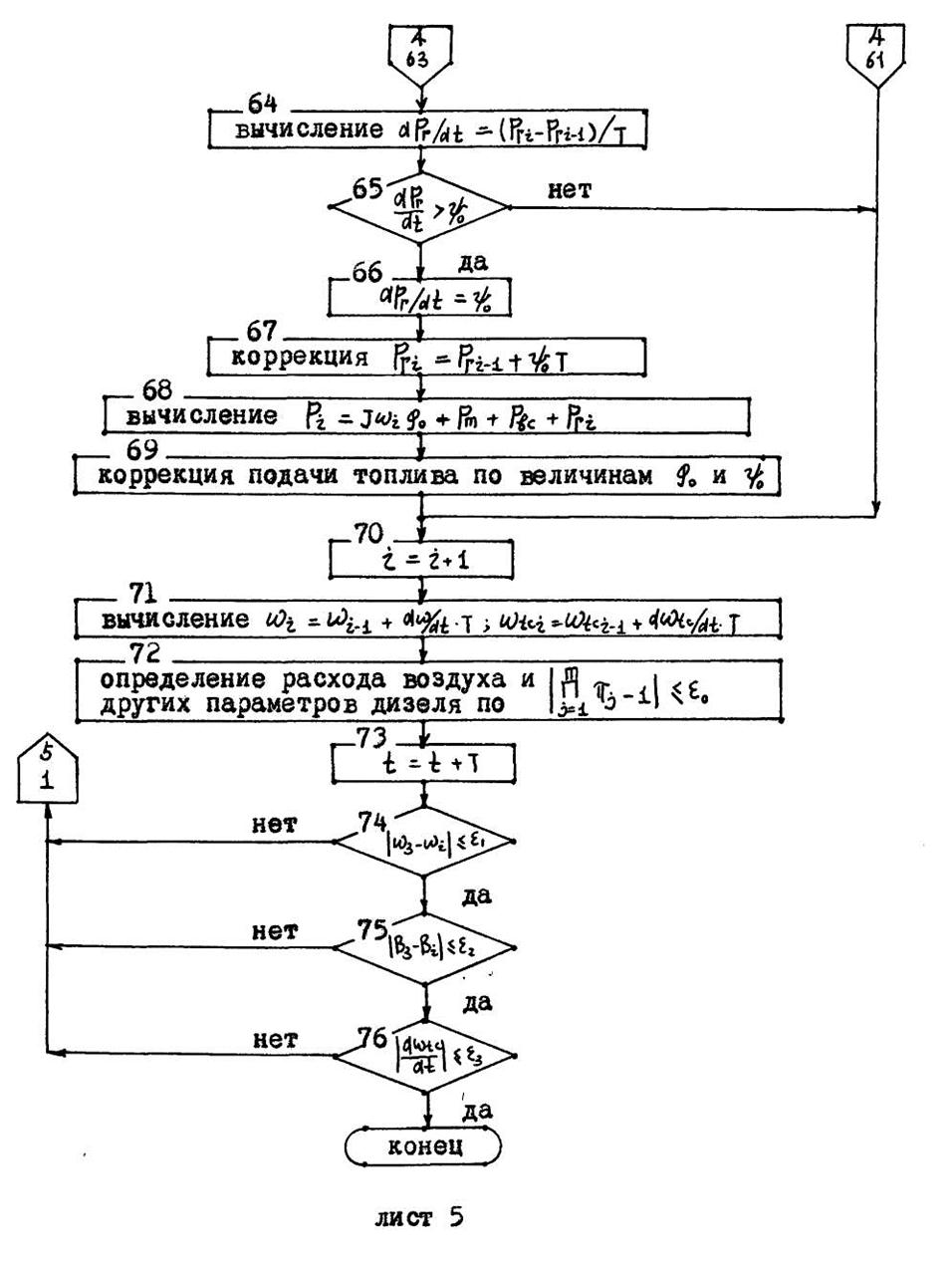
В блоках 59-69
корректируются цикловая подача топлива и мощность ДГ по величинам ![]() и
и ![]() .
.
В блоке 70
производится расчет следующего цикла ![]() . В блоке 71
получаются новые значения частоты вращения вала ДГ, частоты вращения ротора
турбокомпрессора и др.
. В блоке 71
получаются новые значения частоты вращения вала ДГ, частоты вращения ротора
турбокомпрессора и др.
В блоке 72
определяются расход воздуха ![]() , давление
, давление ![]() и температура
и температура ![]() наддувочного воздуха и другие
параметры рабочего процесса.
наддувочного воздуха и другие
параметры рабочего процесса.
В блоках 74-76 проверяются условия окончания переходного процесса ДГ. Если переходной процесс не окончен, то расчет продолжается и повторяется с блока 5.
Для исследования эффективности разработанных алгоритмов управления использовались данные дизель-генератора 2-5Д49 тепловоза 2ТЭ121. Программы расчета переходных процессов составлены на языке ТУРБО-ПАСКАЛЬ [11].
 Алгоритмы расчета переходного
процесса ДГ
Алгоритмы расчета переходного
процесса ДГ
|
|
|
|
|
|
|
|
Расчеты проводились по трем направлениям:
1. Исследование
регулятора частоты вращения при отсутствии регулятора мощности. На основании
результатов расчета получены оптимальные коэффициенты передачи регулятора
частоты вращения: ![]() .
.
Длительность
переходного процесса, оцениваемая по моменту достижения амплитуды частоты
вращения ![]() от установившегося значения
(половина допустимой ГОСТом 10511-83 [12] нестабильности частоты вращения для регулятора
частоты вращения первого класса точности), при сбросе 100% нагрузки составила
1,0 с, а относительное перерегулирование - 2,6% (рис.4.2.).
от установившегося значения
(половина допустимой ГОСТом 10511-83 [12] нестабильности частоты вращения для регулятора
частоты вращения первого класса точности), при сбросе 100% нагрузки составила
1,0 с, а относительное перерегулирование - 2,6% (рис.4.2.).
Переходный процесс дизель-генератора с дизелем 2-5Д49 при сбросе 100% нагрузки
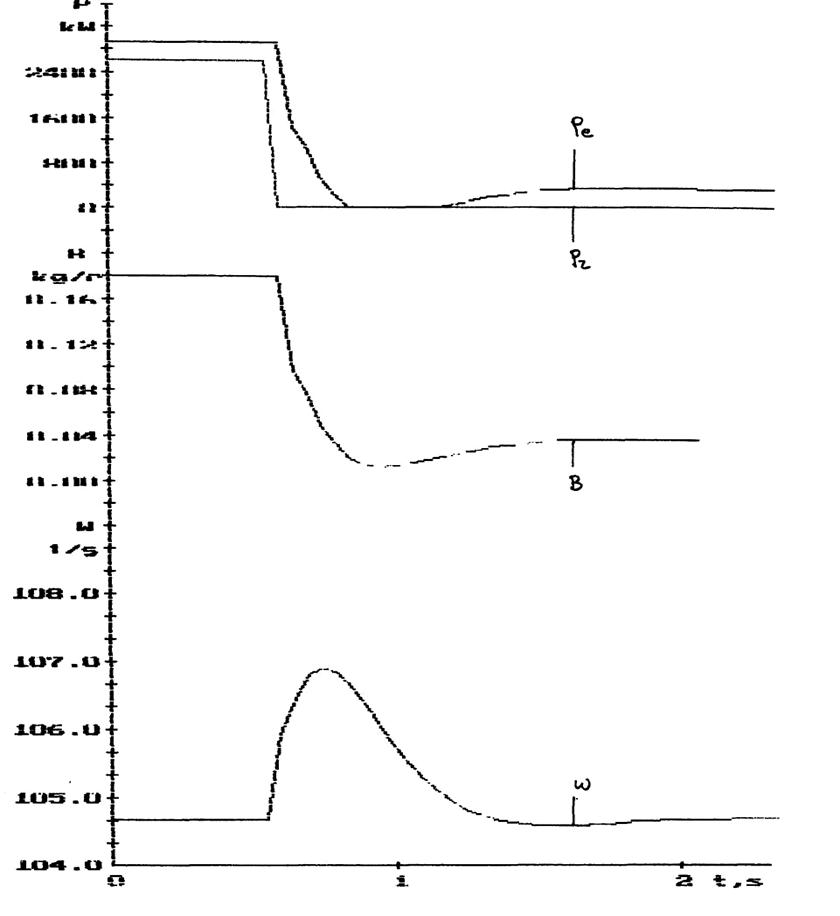
Рис.4.2.
При набросе 100% нагрузки при постоянной заданной частоте вращения ![]() = 104,7 рад/с время переходного
процесса составило 1,6 с, а перерегулирование - 2,6%. В штатной системе
управления ДГ 2-5Д49 тепловоза 2TЭI2I при набросе 100% нагрузки данные
показатели соответственно
= 104,7 рад/с время переходного
процесса составило 1,6 с, а перерегулирование - 2,6%. В штатной системе
управления ДГ 2-5Д49 тепловоза 2TЭI2I при набросе 100% нагрузки данные
показатели соответственно ![]() . Поэтому
регулятор частоты вращения микропроцессорной системы управления ДГ заметно
улучшил качество переходного процесса.
. Поэтому
регулятор частоты вращения микропроцессорной системы управления ДГ заметно
улучшил качество переходного процесса.
При разгоне коленчатого вала дизеля от холостого хода до номинальной частоты вращения без нагрузки длительность переходного процесса составила 9,5 с, а относительное перерегулирование – 0,2%. Результаты расчета также показали, что регулятор частоты вращения МП системы управления ДГ с полученными расчетными параметрами позволяет обеспечить удовлетворительное качество переходных процессов, вызываемых периодическими синусоидальным и прямоугольным возмущениями нагрузки.
2. Проверка
эффективности работы регулятора мощности. Расчеты производились путем сочетания
регулятора мощности и регулятора частоты вращения с полученными параметрами. На
основании результатов расчета получены величины коэффициентов передачи
регулятора мощности: ![]() .
.
Относительное перерегулирование при выключении вспомогательных агрегатов тепловоза составило 0,286%. Таким образом, МП система управления ДГ позволяет обеспечить инвариантность во всем диапазоне переходного процесса выключения вспомогательных нагрузок тепловоза. Такого качества не обеспечивала штатная система управления ДГ 2-5Д49 тепловоза 2T3I21.
При включении вспомогательных агрегатов и периодических синусоидальном и прямоугольном возмущениях МП система управления ДГ обеспечивает сходимость переходных процессов.
3. Исследования переходного процесса разгона и нагружения ДГ. На основании результатов расчета переходного процесса, вызываемого увеличением частоты вращения вала и мощности ДГ от холостого хода до номинального режима, получены следующие параметры МП системы управления ДГ тепловоза:
При расчетных значениях параметров МП системы управления ДГ тепловоза время переходного процесса разгона и нагружения от холостого хода до номинального режима работы ДГ составило 42 с, заданное значение частоты вращения достигалось за 15 с. Кривые переходного процесса разгона и нагружения ДГ (рис.4.3.). Время переходного процесса ДГ тепловоза 2ТЭ121 с штатной системой управления составило 57 с, так что МП система управления ДГ позволяет уменьшить время переходного процесса на 26,3%. Уменьшение времени разгона коленчатого вала дизеля и длительности переходного процесса соответственно позволяет снизить удельный расход топлива.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.