Для повышения надежности передачи информации данные внутри пакетов передаются с использованием алгоритма байтстаффинга, исключающего ложное распознавание на приемной стороне начала пакета внутри данных при наличии сбоя по длине пакета. Это осуществляется путем ввода в передаваемый пакет дополнительных служебных байтов. Байты данных, не равные байту начала пакета (SYNC-START), передаются, как есть. Если же байт данных равен SYNC-START, то после него передается байтстаффинг. На приемной стороне все байты принимаются до тех пор, пока не будет принят байт SYNC-START, после чего необходимо проанализировать следующий принятый байт, и если он равен байтстаффингу, то считается, что предыдущий байт - данные; байтстаффинг игнорируется, и продолжается прием пакета. В противном случае считается, что произошла потеря пакета и начинается прием нового пакета данных.
Для осуществления обмена между секциями необходимо, чтобы блоки МИК РС-510 секций определили свой статус в линии: ведущий или ведомый. Ведущий МИК своими запросами в линию связи тактирует ведомый на получение от него параметров с ведомой секции и выводит информацию для машиниста локомотива (параметры о состоянии оборудования ведущей и ведомой секции). Ведомый МИК передает информацию по этим запросам на ведущий МИК и индицирует параметры своей секции.
Статус определяется следующим образом: если у МИК РС-510 есть связь с блоком БЭЛ и в информационном пакете блока БЭЛ установлен признак ведущей секции, то блок ведущий. В остальных случаях - ведомый.
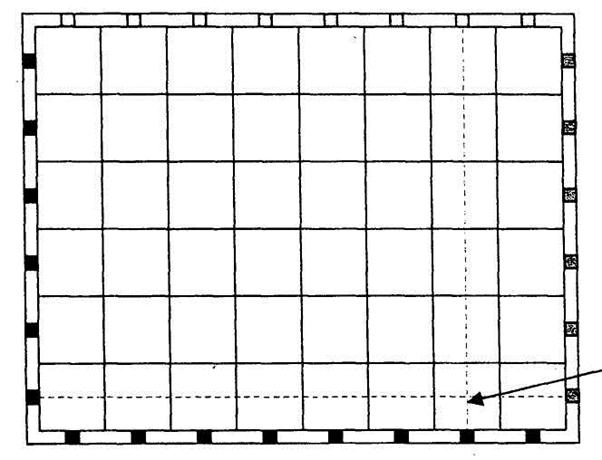
Для осуществления взаимодействия с машинистом локомотива в микропроцессорном индикаторном комплекте МИК РС-510 используется квазисенсорное управление. Это управление осуществляется применением пар «излучатель (фототранзистор) - фотоприемник», установленных по периметру перед электролюминесцентной индикаторной панелью: 6 пар по вертикали и 8 пар по горизонтали (рис. 5.4.), что обеспечивает возможность использования 48 зон вмешательства пользователя и по размерам соответствует эргономическим требованиям к обычной клавиатуре ПК.
Расположение пар «излучатель - фотоприемник»
|
|
Рис.5.4.
■ — излучатель □ — фотоприемник
Программное обеспечение МИК РС-510 с определенной частотой производит сканирование пар на наличие перекрытия их лучей и однозначно определяет зону вмешательства пользователя.
Данная реализация интерфейса с машинистом дает широкие возможности в использовании многоуровневых интуитивно понятных алгоритмов по выводу параметров подсистем локомотива и не требует специальной подготовки персонала при вводе УПУ в эксплуатацию.
Разработанная структурная схема МП САУ ДГ позволяет реализовать принятые алгоритмы управления.
1. Бубнов Р. В. Тепловозы типа ТЭ10 с улучшенными тяговыми характеристиками. http://ita.times.lv/Ritsastavs/Bubnov_ru.html.
2. Коссов Е. Е., Сухопаров С. И. Оптимизация режимов работы тепловозных дизель-генераторов.-М. Интекст,1999.-184 с.
3. Крутов В. VI., Васильев-Южин P.M. Задачи и перспективы развития систем автоматического регулирования и технического диагностирования дизелей // Двигателестроение. 1988. № 6. с. 3-6.
4. Дуков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988. - 272 с.
5. Молчанов А.И. Разработка и исследование системы управления топливоподачей тепловозного дизеля с электрогидравлическими форсунками. Диссертация на соискание ученой степени к.т.н. - M.1978.
6. Виноградов А.С. Электрическое управление топливоподачей
на тепловозах. Диссертация на соискание ученой степени к.т.н.- М. , 1982. -
175 с.
7. Коссов Е.Е. Выбор генераторной характеристики тепловозного
дизеля с учетом режимов работы в эксплуатации //
Тез. докл. Всесоюзной научн.-техн.конф. "Проблемы создания и использования
двигателей с высоким наддувом".- Харьков, 1979. с. 406-408.
8. Коссов Е.Е. Моделирование переходных процессов тепловозного дизель-генератора / МИИТ. - М., 1985. - 29 с. - Деп. в ЦНИИТЭИтяжмаш № I543B5-85.
9. Пинский Ф. И. Электронное управление впрыскиванием
топлива
в дизелях: Учебное пособие / Коломенский филиал ВЗПИ.- 1989.- 146 с.
10. Изерман Р. Цифровые системы управления. Пер. с англ.- М.: Мир, 1984. - 541 с.
11. Фаронов В.В. Программирование на персональных компьютерах в среде Турбо-Паскаль. - М. Изд-во МГТУ, 1991. - 580 с.
12. ГОСТ 10511-83. Системы автоматического регулирования частоты
вращения (АРЧ) судовых, тепловозных и промышленных
дизелей. Общие технические требования. - М. Изд-во стандартов, 1984. - 15 с.
13. Модернизация подвижного состава/Под ред. Коссова В.С.-Коломна,2003.-190 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.