При сравнении показателей рассматриваемых способов регулирования в случае равных продолжительностей выработки заданной энергии на тягу поезда пришлось бы для увеличения быстродействия при штатном регулировании снять ограничения на подачу топлива и вести процесс при низких значениях топливно-воздушного соотношения и, следовательно, более низких КПД дизеля. При этом топливная экономичность в случае оптимального регулирования процесса оказывается выше. На наш взгляд, сравнение экономичности работы дизеля по показателям только переходного процесса без учета эксплуатационного режима вообще неправомерно. Далее эти вопросы рассмотрены более подробно.
Основными преимуществами оптимального регулирования являются меньшая продолжительность и низкая чувствительность к изменению ограничительных параметров. Влияние этих свойств на показатели работы тепловоза рассмотрены выше.
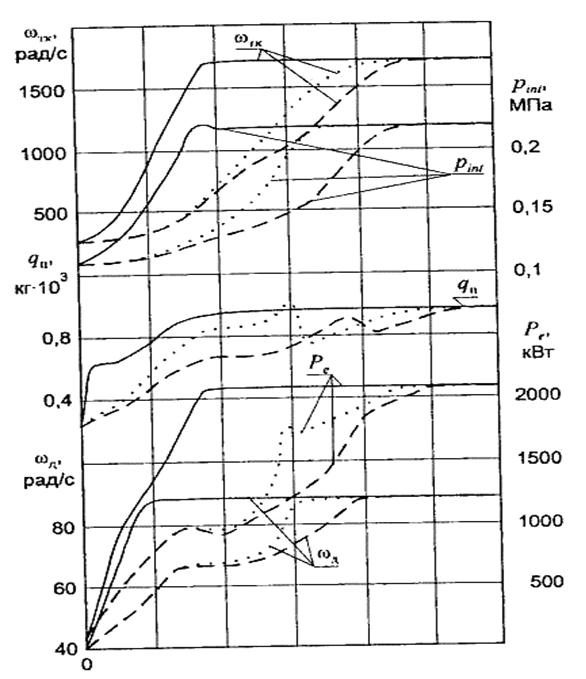
Оптимальное управление переходным процессом улучшает показатели работы двухтактных двигателей. Количественные изменения этих показателей для двухтактных форсированных дизелей при оптимальном управлении получены моделированием рабочих процессов дизеля 10Д100. Из сравнения кривых (рис. 2.4.) следует, что оптимальное управление позволяет существенно интенсифицировать процесс разгона ротора турбокомпрессора и сократить время переходного процесса, причем улучшение показателей переходного процесса достигается при ограничении параметров рабочего процесса.
Временные характеристики переходных процессов в дизель - генераторе 10Д100 при оптимальном управлении (сплошные кривые) и штатном с учетом (штриховые) и без учета (пунктирные) ограничений подачи топлива и мощности в зависимости от давления наддувочного воздуха
|
|
Рис. 2.4.
3. АЛГОРИТМЫ УПРАЛЕНИЯ ДИЗЕЛЬ-ГЕНЕРАТОРОМ ТЕПЛОВОЗА ПРИ ПРИМЕНЕНИИ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
3.1. Перспективность развития систем автоматического управления дизель-генератором
Для тепловозных дизелей (Д) в соответствии с основными требованиями надежности и экономичности оптимальный переходной процесс должен определятся не только качеством регулирования частоты вращения коленчатого вала дизеля, но и качеством протекания рабочих процессов в цилиндрах дизеля. В серийных объединенных гидромеханических регуляторах обеспечивается связное регулирование частоты вращения коленчатого вала и мощности нагрузки дизеля. При этом достигается достаточно высокое качество переходных процессов регулирования частоты вращения, однако из-за рассогласования воздухоснабжения и топливоподачи на переходных режимах индикаторный к.п.д. дизеля снижается.
В то же время регулирование топливоподачи не только по частоте вращения, но и по давлению и температуре наддувочного воздуха в гидромеханических регуляторах вызывает в гидромеханических регуляторах вызывает серьезные трудности. Законы управления определяются конструктивными параметрами регуляторов. Настройка и регулировка выполняются в стационарных заводских условиях.
Задача оптимизации переходных процессов тепловозных дизелей с газотурбинным наддувом технически сложна и решается путем совершенствования систем управления и органов топливоподачи.
Наиболее перспективным направлением развития систем управления является разработка систем с использованием микропроцессорной (МП) техники [3,4].
Микропроцессорные системы автоматического управления (МП САУ) позволяют реализовать любые заданные алгоритмы управления с учетом необходимых параметров работы дизеля, генератора (Г) и различных внешних факторов. Причем алгоритмы управления можно изменять программным путем, не изменяя аппаратной части системы.
Реализация сложных алгоритмов управления с оптимизацией рабочих процессов в цилиндрах дизеля возможна путем применения форсунок с электрогидравлическим или электромагнитным управлением [5,6]. Применение таких форсунок связано с решением ряда сложных задач регулирования угла опережения впрыска.
В данной работе предлагается один из возможных путей совершенствования алгоритмов управления тепловозными дизель-генераторами (ДГ).
Анализ показывает, что жесткие алгоритмы управления могут быть оптимальны только для одного конкретного переходного режима увеличения заданных частоты вращения вала и мощности ДГ. Все промежуточные изменения заданного режима работы не обязательно будут отработаны по оптимальным законам. Таким образом, алгоритмы оптимального управления для установившихся и переходных режимов отработки различных воздействий существенно различны. В связи с этим для минимизации длительности переходных процессов, вызываемых увеличением частоты вращения вала и мощности ДГ, в МП САУ ДГ тепловоза используются переменные алгоритмы управления.
Для
согласования топливоподачи и воздухоснабжения, сигнал регулирования цикловой
подачи топлива определяется с учетом давления Ps и
температуры Ts наддувочного воздуха при поддержании
заданного коэффициента избытка воздуха ![]() :
:
 ,
(3.1)
,
(3.1)
где ![]() - максимальный допустимый сигнал
регулирования цикловой подачи топлива;
- максимальный допустимый сигнал
регулирования цикловой подачи топлива;
![]() - коэффициент пропорциональности.
- коэффициент пропорциональности.
Заданная
цикловая подача топлива ![]() определяется по
тепловозной характеристике [5]:
определяется по
тепловозной характеристике [5]:
 , (3.2)
, (3.2)
где ![]() - постоянные;
- постоянные;
![]() - заданная частота вращения, рад/с.
- заданная частота вращения, рад/с.
В то же время
цикловая подача топлива не должна превышать величины, соответствующей
ограничению по мощности нагрузки ДГ в зависимости от давления Ps
наддувочного воздуха для уменьшения теплонапряженности Д, ограничения степени
дымности отработавших газов (рис.3.1.). Ограниченная цикловая подача топлива ![]() по давлению Ps
определяется кусочно-линейной функцией:
по давлению Ps
определяется кусочно-линейной функцией:
 ,
(3.3)
,
(3.3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.