 ,
(3.9)
,
(3.9)
где ![]() - допустимая
величина приемистости ДГ тепловоза по мощности, Вт/с.
- допустимая
величина приемистости ДГ тепловоза по мощности, Вт/с.
Структурная схема МП САУ ДГ тепловоза, позволяющая реализовать предлагаемые алгоритмы управления
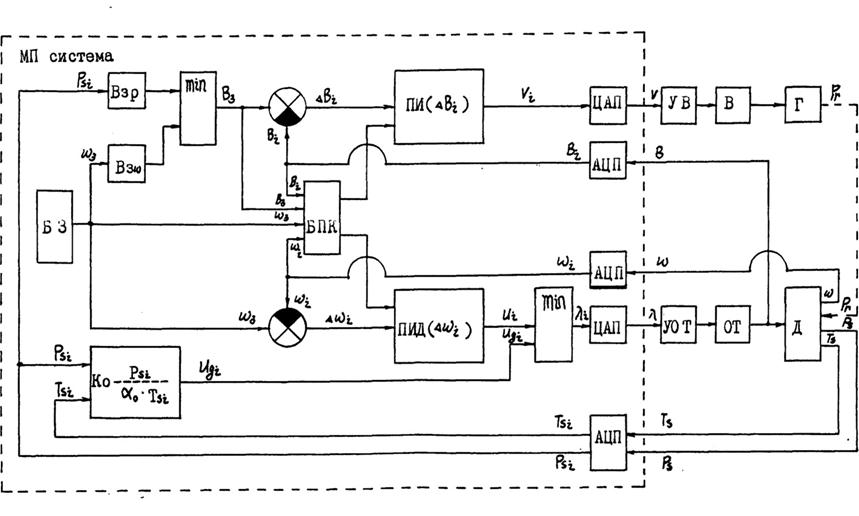
Рис.3.3.
Разработанная МП САУ ДГ тепловоза позволяет улучшить переходные процессы разгона и нагружения ДГ во всем диапазоне изменения частоты вращения и нагрузки.
1. Микропроцессорные системы управления
дизель-генераторами
тепловозов являются наиболее перспективными для решения
задач улучшения качества протекания переходных процессов.
2. Для уменьшения длительности переходных процессов
при ограничениях максимальной цикловой подачи топлива, ускорения коленчатого
вала дизеля и темпа увеличения мощности
тягового генератора целесообразно использовать алгоритмы
управления, где для регулирования частоты вращения и мощности соответственно
применяются ПИД- и ПИ-законы с переменными коэффициентами передачи.
Переключение коэффициентов передачи регуляторов осуществляется в точках» определяемых
относительными частотой вращения ![]() и цикловой
и цикловой
подачей топлива ![]() дизеля.
дизеля.
3. Для качественного протекания рабочего процесса
дизеля
расчетный сигнал управления топливоподачей определяется
с учетом ограничений по давлению ![]() и температуре
и температуре ![]() наддувочного воздуха и коэффициенту избытка воздуха
наддувочного воздуха и коэффициенту избытка воздуха ![]() .
.
4. Разработанная структурная схема МП САУ ДГ позволяет реализовать принятые алгоритмы управления.
Исследование эффективности разработанных алгоритмов управления дизель-генератором (ДГ) тепловоза проводилось на математической модели микропроцессорной (МО) системы управления дизель-генератором.
Математическая модель МП системы управления ДГ тепловоза состоит из алгоритмов управления и системы дифференциальных уравнений ДГ тепловоза. 6 данной работе использована система нелинейных дифференциальных уравнений, определенная профессором Е.Е. Коссовым [8].
Уравнение вращательного движения вала ДГ:
 ,
(4.1)
,
(4.1)где ![]() - приведенные
момент инерции движущихся масс к оси вала ДГ, кг·м²;
- приведенные
момент инерции движущихся масс к оси вала ДГ, кг·м²;
![]() - угловая скорость вала
ДГ, рад/с;
- угловая скорость вала
ДГ, рад/с;
![]() - время, с;
- время, с;
![]() - соответственно моменты,
создаваемые силами газов, механическими сопротивлениями дизеля,
вспомогательными нагрузками и генератором, Н·м.
- соответственно моменты,
создаваемые силами газов, механическими сопротивлениями дизеля,
вспомогательными нагрузками и генератором, Н·м.
Так как между моментом М и мощностью Р существует
зависимость ![]() , уравнение (1) может переписываться
в следующей форме:
, уравнение (1) может переписываться
в следующей форме:
 , (4.2)
, (4.2)
Индикаторная мощность дизеля:
![]() ,
(4.3)
,
(4.3)
где  - коэффициент пропорциональности;
- коэффициент пропорциональности;
![]() - низшая теплота сгорания топлива,
кДж/кг;
- низшая теплота сгорания топлива,
кДж/кг;
![]() - количество цилиндров дизеля;
- количество цилиндров дизеля;
![]() - коэффициент тактности;
- коэффициент тактности;
![]() - индикаторный к.п.д.;
- индикаторный к.п.д.;
![]() - цикловая подача топлива, кг/цикл;
- цикловая подача топлива, кг/цикл;
Индикаторный
к.п.д. аппроксимирован по частоте вращения ![]() и
коэффициенту избытка воздуха
и
коэффициенту избытка воздуха ![]() :
:
 , (4.4)
, (4.4)
где ![]() - постоянные.
- постоянные.
Коэффициент избытка воздуха:
 ,
(4.5)
,
(4.5)
где ![]() - расход воздуха, кг/с;
- расход воздуха, кг/с;
![]() - теоретически необходимое количество
воздуха для сгорания 1 кг дизельного топлива;
- теоретически необходимое количество
воздуха для сгорания 1 кг дизельного топлива;
![]() - секундный расход топлива, кг/с.
- секундный расход топлива, кг/с.
Мощности механических потерь дизеля и вспомогательных нагрузок зависят от частоты вращения вала ДГ и могу быть аппроксимированы соотношениями:
![]() ,
(4.6)
,
(4.6)
![]() ,
(4.7)
,
(4.7)
где ![]() - постоянные.
- постоянные.
Мощность генератора
![]() состоит из двух частей:
состоит из двух частей:
![]() ,
(4.8)
,
(4.8)
где ![]() - часть мощности генератора,
зависящая от частоты вращения вала ДГ;
- часть мощности генератора,
зависящая от частоты вращения вала ДГ;
![]() ,
(4.9)
,
(4.9)
![]() - непосредственно регулируемая часть
мощности генератора, зависящая от управляющего воздействия
- непосредственно регулируемая часть
мощности генератора, зависящая от управляющего воздействия ![]() регулятора мощности;
регулятора мощности;
![]() ,
(4.10)
,
(4.10)
где ![]() - постоянные.
- постоянные.
При расчете переходных процессов расход воздуха, определенный в каждом цикле расчета, должен обеспечить выполнение условия:
 ,
(4.11)
,
(4.11)
где ![]() - перепад давления в каждом элементе
и агрегате дизеля;
- перепад давления в каждом элементе
и агрегате дизеля;
![]() - количество элементов и агрегатов
дизеля;
- количество элементов и агрегатов
дизеля;
![]() - заданная точность расчета.
- заданная точность расчета.
Анализ [9] показывает, что форсунки с электронным управлением можно считать запаздывающими звеньями. При расчете переходных процессов пренебрежимо запаздывание процесса формирования цикловой подачи топлива (время запаздывания по сравнению с шагом цикла расчета значительно мало). При этом допущении величина цикловой подачи топлива прямо пропорциональна величине управляющего воздействия регулятора частоты вращения.
Алгоритмы управления ДГ определены ПИД-законом [10] для регулятора частоты вращения и ПИ-законом для регулятора мощности с переменным коэффициентом передачи:
 , (4.12)
, (4.12)
где ![]() - коэффициенты передачи регулятора
частоты вращения;
- коэффициенты передачи регулятора
частоты вращения;
![]() - уставки переключения структуры
регулятора частоты вращения;
- уставки переключения структуры
регулятора частоты вращения;
![]() - интегральная составляющая
управляющего воздействия регулятора частоты вращения в предыдущем (i-1–ом) шаге;
- интегральная составляющая
управляющего воздействия регулятора частоты вращения в предыдущем (i-1–ом) шаге;
![]() - период управления, с;
- период управления, с;
![]() - величина управляющего воздействия
регулятора мощности в текущем (i-ом) шаге;
- величина управляющего воздействия
регулятора мощности в текущем (i-ом) шаге;
![]() - интегральная составляющая
управляющего воздействия регулятора мощности в предыдущем (i-1-ом)
шаге;
- интегральная составляющая
управляющего воздействия регулятора мощности в предыдущем (i-1-ом)
шаге;
![]() - коэффициенты передачи регулятора
мощности;
- коэффициенты передачи регулятора
мощности;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.