где ![]() - постоянные;
- постоянные;
С учетом выражений (3.2) и (3.3) заданная цикловая подача топлива определяется:
![]() ,
(3.4)
,
(3.4)
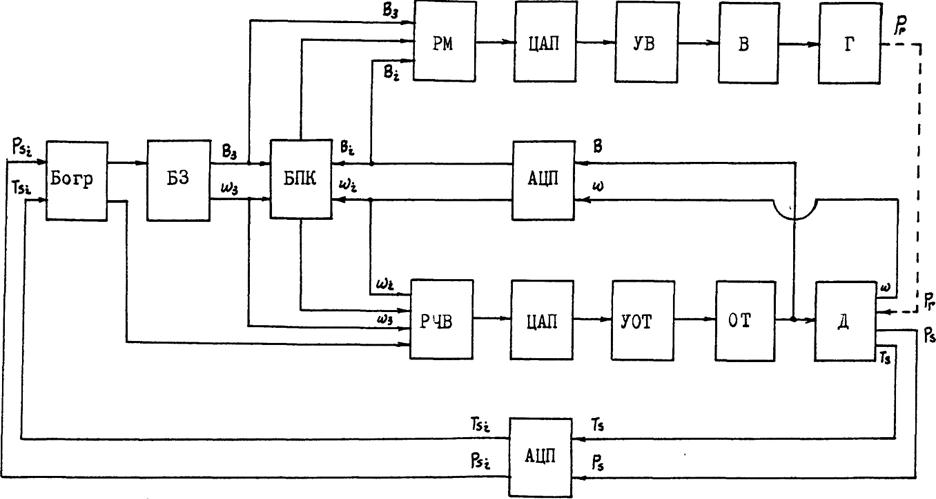
рис.3.1.
В схему включены дизель (Д), орган топливоподачи (ОТ), тяговый генератор (Г),система возбуждения (В) и МП система. МП система содержит регулятор частоты вращения (РЧВ), регулятор мощности (РМ), блок ограничений (Богр), блок задания (БЗ), блок переключения коэффициентов передачи регуляторов (БПК), цифро-аналоговый преобразователь (ЦАП) и аналого-цифровой преобразователь(АЦП). В схему также включены усилительные устройства УОТ и УВ для усиления мощности выходных сигналов соответственно регулятора частоты вращения и регулятора мощности.
3.3. Задачи микропроцессорной системы автоматического управления дизель-генератором
В общем случае МП САУ ДГ тепловоза должна выполнить следующие задачи:
- обеспечение устойчивой работы ДГ тепловоза на установившихся режимах;
- обеспечение скорейшего устранения влияния возмущений на работу ДГ из-за изменения внешней нагрузки;
- улучшение переходных процессов, вызываемых изменением заданного режима работы ДГ тепловоза.
Первая задача относится к точности поддержания частоты вращения коленчатого вала Д в установившихся режимах; вторая – к уменьшению значений перерегулирования и длительности переходного процесса отработки изменения нагрузки при постоянном заданном режиме. Обе задачи сводятся к обеспечению инвариантности в максимально возможном диапазоне изменения нагрузки при одновременном улучшении качества управления и в установившихся режимах. В МП САУ ДГ тепловоза для обеспечения инвариантности необходимо комбинированное (двухканальное) управление по отклонению частоты вращения и по изменению нагрузки на дизель. Поэтому для управления установившимися и квазиустановившимися режимами целесообразно отрабатывать алгоритмы с устойчивой структурой.
Третья задача заключается в том, чтобы улучшить переходные процессы, вызываемые изменением заданного режима работы ДГ, путем поддержания заданного значения коэффициента избытка воздуха с учетом условий ограничений. Таким образом, задача улучшения переходных процессов разгона и нагружения ДГ сводится к необходимости:
- скорейшего выхода подачи топлива на ограничение по наддуву;
- уменьшения времени разгона коленчатого вала Д при допустимой приемистости ДГ тепловоза и условии прочности коленчатого вала дизеля;
- нагружения ДГ до заданного установившегося режима работы без провалов по частоте вращения.
Для выполнения этих требований применяются переменные
алгоритмы управления. Допустимые режимы разгона и нагружения ДГ осуществляется путем изменения
алгоритмов управления за счет переключения коэффициентов передачи. Параметры
переключения коэффициентов определяются
относительными частотой вращения ![]() и цикловой
подачей топлива
и цикловой
подачей топлива ![]() ,
,
где ![]() и
и ![]() - соответственно частота вращения
вала ДГ и цикловая подача топлива на текущем (i-ом) шаге.
- соответственно частота вращения
вала ДГ и цикловая подача топлива на текущем (i-ом) шаге.
Алгоритмы управления ДГ определены ПЩ- и ПИ-законами для РЧВ и РМ с переменными коэффициентами передачи.
Переменные алгоритмы регулятора частоты вращения вала ДГ выражается следующим образом:
 ,
(3.5)
,
(3.5)
где ![]() -
управляющее воздействие РЧВ на текущем (i-ом) шаге;
-
управляющее воздействие РЧВ на текущем (i-ом) шаге;
 - интегральная составляющая
управляющего воздействия РЧВ на предыдущем (i-1-ом) шаге;
- интегральная составляющая
управляющего воздействия РЧВ на предыдущем (i-1-ом) шаге;
![]() - коэффициенты передачи РЧВ;
- коэффициенты передачи РЧВ;
![]() - период управления, с.
- период управления, с.
В соответствии с предусмотренными задачами улучшения переходных процессов разгона и нагружения ДТ РЧВ (рис. 3.2) должен обладать тремя структурами, определяемыми коэффициентами передачи:
- форсирующей ( ),
обеспечивающей наибольшее
),
обеспечивающей наибольшее
возможное и допустимое управляющее воздействие на дизель;
демпфирующей (![]() ),
снижающей скорость изменения управляющего воздействия на дизель;
),
снижающей скорость изменения управляющего воздействия на дизель;
устойчивой (![]() ) с большим
запасом для установившихся и квазиустановившихся режимов.
) с большим
запасом для установившихся и квазиустановившихся режимов.
Действительный сигнал регулирования топливоподачи ![]() определяется минимальным из сигналов
определяется минимальным из сигналов
![]() и
и ![]() :
:
 (3.6)
(3.6)
Структурная схема регулятора частоты вращения
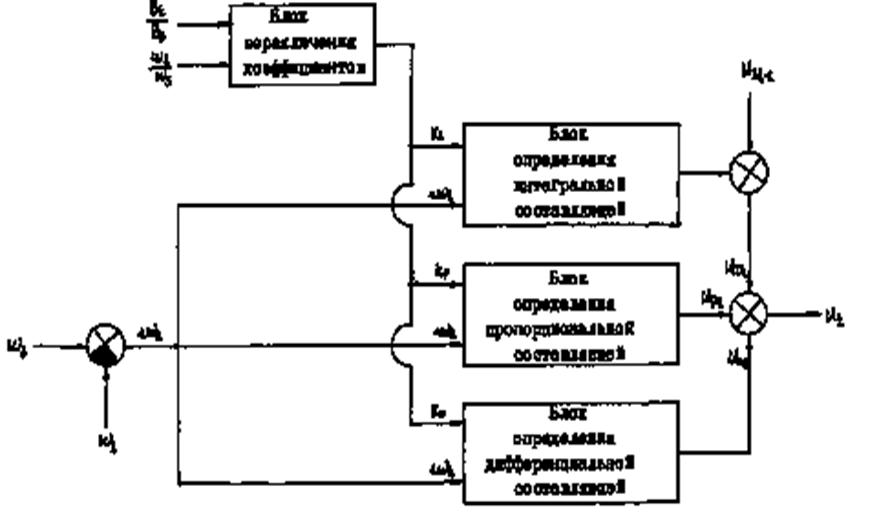
Рис.3.2.
Переменные алгоритмы регулятора мощности имеют вид:
 , (3.7)
, (3.7)
где
![]() - управляющее воздействие РМ на
текущем шаге;
- управляющее воздействие РМ на
текущем шаге;
 - интегральная
составляющая управляющего воздействия РМ на предыдущем (i-1
–ом) шаге;
- интегральная
составляющая управляющего воздействия РМ на предыдущем (i-1
–ом) шаге;
![]() - коэффициенты
передачи РМ.
- коэффициенты
передачи РМ.
Регулятор мощности должен обладать по крайней мере четырьмя принципиально различными структурами, определяемыми коэффициентами передачи:
- низконагруженной (![]() )
для обеспечения предвари
)
для обеспечения предвари
тельного разгона коленчатого вала дизеля;
- форсирующей ( ),
обеспечивающей наибольшее
),
обеспечивающей наибольшее
возможное и допустимое управляющее воздействие на тяговый
генератор после разгона коленчатого вала дизеля;
- демпфирующей (![]() ),
снижающей скорость изменения
),
снижающей скорость изменения
управляющего воздействия РМ;
- устойчивой (![]() )
для установившихся и квазиустановившихся режимов.
)
для установившихся и квазиустановившихся режимов.
Для определения параметров регуляторов разработана математическая модель МП САУ ДГ тепловоза и составлена программа на языке ТУРБО-ПАСКАЛЬ, которая решается на ЭВМ.
При определении коэффициентов передачи регуляторов ![]() и выбора уставок переключения
коэффициентов
и выбора уставок переключения
коэффициентов ![]() (где n =
1, 2; m = 1,2,3; l = 1,2,3,4), позволяющих
улучшить переходные процессы разгона и нагружения ДГ, необходимо выполнить
следующие требования:
(где n =
1, 2; m = 1,2,3; l = 1,2,3,4), позволяющих
улучшить переходные процессы разгона и нагружения ДГ, необходимо выполнить
следующие требования:
- угловое ускорение коленчатого вала дизеля должно соответствовать условию:
 ,
(3.8)
,
(3.8)
где ![]() - допустимая
величина углового ускорения, рад/с²;
- допустимая
величина углового ускорения, рад/с²;
- темп увеличения мощности нагрузки генератора должен соответствовать условию:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.