



















4. НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
4.1. Общие вопросы нелинейного программирования
4.1.1. Постановка задачи нелинейного программирования
z(X) ® min
gj(X) £ 0, i=1,…, m; (4.1)
X ³ 0 .
В этой постановке или z(X), или хотя бы одна из функций gi(X) - нелинейные функции n переменных x1, … ,xn.
В постановках задач НП принято указывать требование нахождения минимума ЦФ. ( В случае необходимости максимизации ЦФ z(X) можно перейти к эквивалентной постановке задачи минимизации функции w(X) = - z(X)).
Необходимо отметить, что различные авторы используют постановки задачи НП, отличные от (4.1) в части ограничений. Так, используются постановки, в которых в состав функциональных ограничений включаются не только неравенства (вида £ или ³ ), но и равенства [6, 26, 36, 43]; постановки, в которых отсутствуют непосредственные ограничения [5, 26, 36, 38]; постановки, в которых указаны непосредственные ограничения, задающие диапазоны допустимых изменений переменных оптимизации [22].
Поэтому, несмотря на то, что функциональные ограничения различных видов формально могут быть сведены к ограничениям, использующимся в (4.1), будем в дальнейшем считать, что постановка задачи НП совпадает с общей постановкой задачи математического программирования вида (1.3) при bi=0.
З а м е ч а н и е 4.1. В постановках задач НП предполагается, что переменные оптимизации непрерывны. Тем не менее, в принципе возможны как задачи нелинейного непрерывного программирования, так и задачи нелинейного дискретного программирования. Задачи второго вида в силу специфики методов их решения относят к задачам дискретного программирования.
4.1.2. Задачи НП в САПР
Задачи оптимального проектирования являются типичными задачами нелинейного программирования [36]. При проектировании новых систем всегда определена экстремальная цель (эффективность, надежность, быстродействие и т.д.). Оптимальное проектирование представляет собой процесс определения параметров конструкции, которые экстремизируют эту цель при соблюдении определенных ограничений. В задачах оптимального проектирования целевая функция и ограничения в большинстве случаев являются нелинейными функциями переменных проектирования. В связи с этим методы НП находят широкое применение в САПР. Они позволяют решать задачи параметрического синтеза объектов и систем в случае, если переменные проектирования – непрерывные величины [22].
Переменным проектирования в рамках методов оптимизации соответствуют переменные оптимизации. При этом ЦФ описывает качество функционирования проектируемой системы или объекта.
Характерной особенностью задач НП, решаемых в САПР, является наличие в них большого числа различного рода ограничений.
При этом в рамках непосредственных (прямых) ограничений помимо традиционных условий неотрицательности, часто используются ограничения вида dj £ xj £ Dj, dj £ xj или xj £ Dj . Поскольку они накладываются на параметры системы, то их называют параметрическими.
Характерно также наличие функциональных ограничений типа равенств или неравенств, которые в рамках САПР трактуются как условия работоспособности проектируемого объекта [21].
4.1.3. Геометрическая интерпретация целевой функции и ограничений
При рассмотрении методов решения задач НП бывает полезной геометрическая интерпретация компонентов постановки задачи.
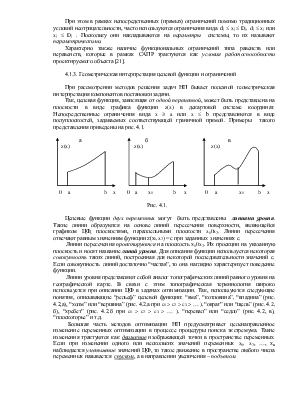
Так, целевая функция, зависящая от одной переменной, может быть представлена на плоскости в виде графика функции z(x) в декартовой системе координат. Непосредственные ограничения вида x ³ a или x £ b представляются в виде полуплоскостей, задаваемых соответствующей граничной прямой. Примеры такого представления приведены на рис. 4.1.
![]()
![]()
![]() а б
в
а б
в
 z(x)
z(x) z(x)
z(x)
z(x) z(x)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
0 a b x 0 a x1 b x 0 a x1 b x
Рис. 4.1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.