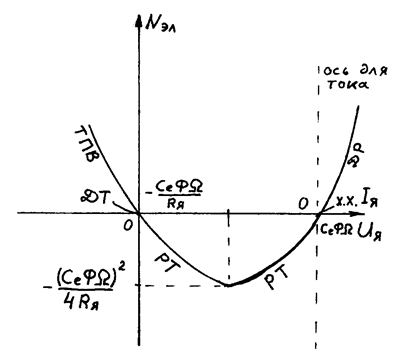
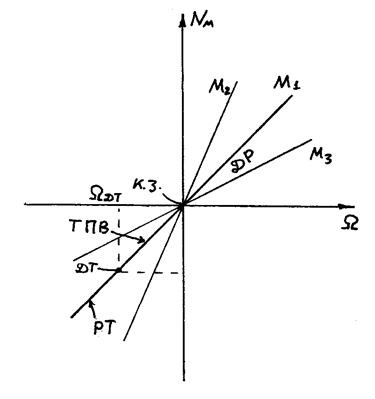
ТПВ – торможение противовключением.
к.з. – короткое замыкание.
Если увеличивается напряжение на якоре – работаем на к.-то искусственной характеристике (2)
![]()
(2)
![]() -
мощность, отдаваемая в сеть.
-
мощность, отдаваемая в сеть.
М=0 => идеальный холостой ход, I=0.
 ,
,
где W0 – скорость идеального холостого хода
То есть с ростом момента и силы тока мощность растёт пропорционально.
![]()
![]()
Напряжение подаём только на якорную обмотку.
Рассмотрим случай управления.
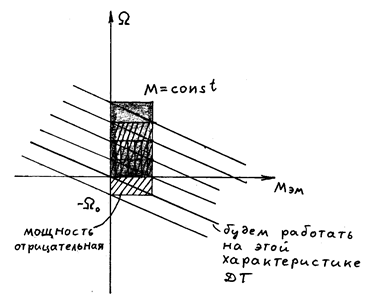
2-й режим
В этом режиме момент нагрузки на валу машины не варьируется.
![]()
(IЯ=const => M=const, Uвозб=const)
(3)
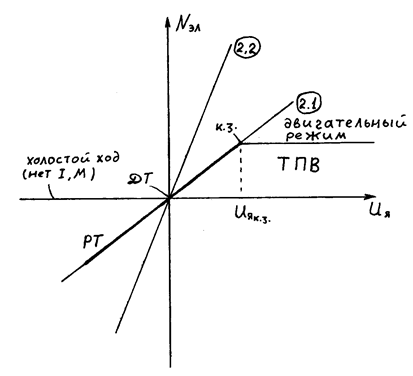
РТ – рекуперативное торможение.
ДТ – динамическое торможение.
M2>М1 (I2>I1)

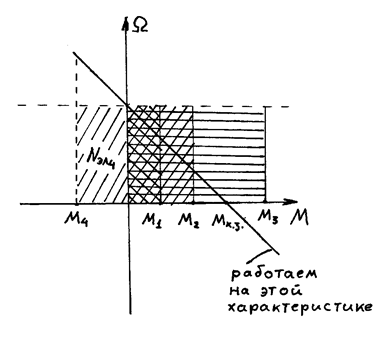
Воспользуемся механическими характеристиками для определения режимов работы.
(4)
Если работать на одной характеристике – режима динамического торможения, нулевое напряжение на зажимах якоря быть не может, за исключением самой характеристики динамического торможения.
3-й режим
Стабилизации скорости ![]()
Меняются оба параметра режима.
![]()
![]()
(W=const, UВ=const)

(5)
Осуществляется стабилизация скорости независимо от возбуждения.
(6)
ДР – двигательный режим.
х.х. – холостой ход.
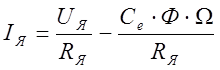
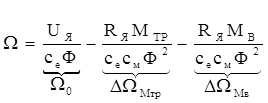
![]() ,
где
,
где
![]() -
ЭДС.
-
ЭДС.
(третий член не учитывается, так как статический режим)

![]()
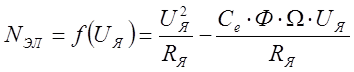
Это параболы, ветви которых направлены вверх.
Найдём экстремумы:
![]()

Найдём пересечение параболы с осью OX:
![]()
 (режим
динамического торможения)
(режим
динамического торможения)
Выход машины – механическая мощность на валу машины или электромеханическая мощность, подводимая к валу машины со стороны статора. Их отличие – это только потери на трение в оси машины.
1-й режим работы – режим регулирования скорости вращения вала двигателя при постоянном моменте.
![]() -
механическая мощность на валу машины; полезная мощность (МВ –
полезный момент).
-
механическая мощность на валу машины; полезная мощность (МВ –
полезный момент).
![]() -
электромеханическая мощность.
-
электромеханическая мощность.
![]()
![]() -
зависимость линейная.
-
зависимость линейная.
(МВ=const, МЭМ=const; UВ=const)
При большом моменте - пойдёт круче.
![]()
(7)

(8)
Лекция от 05.04.00 (Терехова)
2 режим – режим стабилизации скорости.
Скорость вращения вала двигателя равна константе, поэтому мы можемпостроить характеристику только одного вида.
|
Ω=const |
|
|
NM=f(M) |
|
|
UB=const |
NM=Ω*MЭМ – линейная зависимость
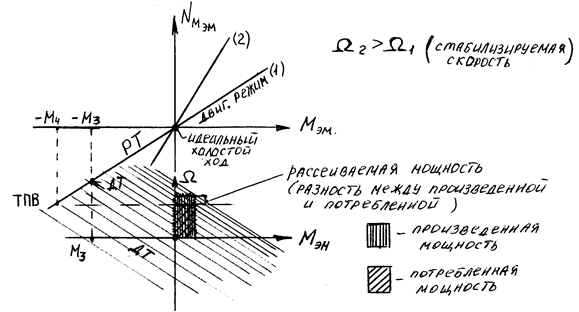
рис. 1
* Если Ω и М одного знака, то режим двигательный (от преобразователя идет поток к валу).
3 режим – машина не регулируемая, а мы работаем на одной характеристике.
При анализе свойств машины и расчетах машины в основном используется именно этот режим (он является основным). В этом режиме при изменении момента будет изменяться и скорость, а следовательно и обе обобщающие сопротивление координаты мощности.
Мы можем построить следующего вида характеристики.
|
NMэм=f(МЭМ) |
UЯ=const |
NMв=f(МВ) |
UЯ=const |
|
UB=const |
UB=const |
||
|
NMэн=f(Ω) |
UЯ=const |
NМв=f(Ω) |
UЯ=const |
|
UB=const |
UB=const |
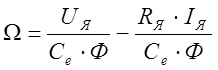
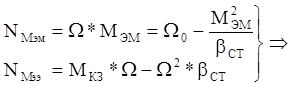
Уравнение механической характеристики:
![]() ,
,
где βст – статический модуль жесткости (угол наклона)
![]()
характеристика имеет вид параболы, ветви которой направлены вниз
Найдем вершину параболы
1)
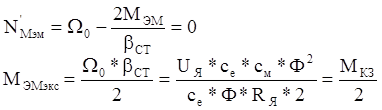
2)

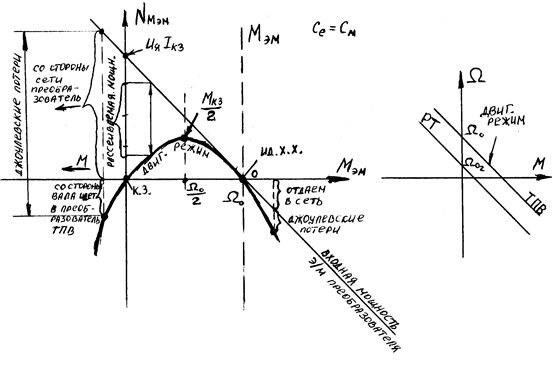
рис. 2
Если Ω0=0, то имеет место динамическое торможение.
МЭМ=МВ+МТР
МТР=ТТРс*sinΩ, Ω≠0
Ω0-∆ΩМтр=Ωхх
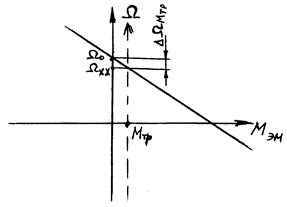
рис. 3
Ω=Ωхх – МВ/βСТ - это уравнение аналогично уравнению механической характеристики, следовательно можно применить все выводы, сделанные выше, но изменить индексы.
Ωэкс=Ωхх /2 ; МВэкс =МВ КЗ /2 ; NМВ= (ΩххМВ КЗ)/4
Построим все три характеристики:
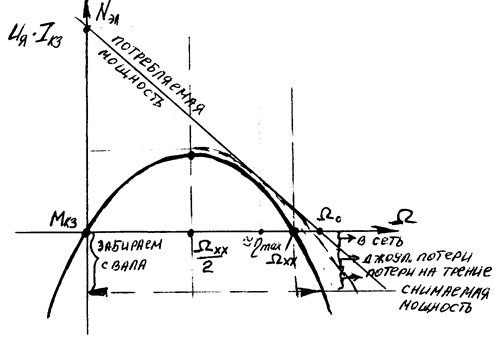
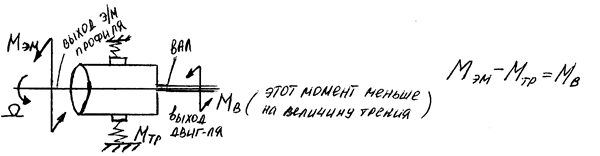
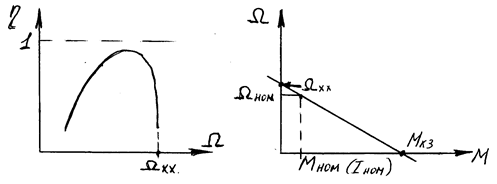
рис. 4
Лекция от 12.04.00 (Золотухин)
Так как, ИД в составе мехатронных систем функционируют как правило в динамических режимах работы, к ним предъявляются специальные требования и при расчетах учитываются их свойства как звена динамической системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.