![]() М
М
Для реализации динамического торможения надо отключить двигатель от сети и зашунтировать накоротко цепь якоря или через добавочные сопротивления.
1. Создать на валу момент - закручивающий вал в туже сторону куда направлено вращение машины.
2. Резкое изменение напряжения на зажимах обмотки якоря (см. п.2 выше).
3. Скачкообразное изменение на зажимах обмотки возбуждения (см. п.3 выше)
Из опыта: введение добавочного сопротивления не эффективно – большие потери энергии на разогрев этих сопротивлений (на джоулево тепло). Сейчас используют новые схемы.
‘ + ‘ Торможения противовключением:
· Большие тормозные моменты Þ можно быстро тормозить.
· Возможность торможения до полной остановки двигателя.
· Для реализации не требуется существенных изменений в схеме.
‘-‘ : большое значение потребляемой энергии при торможении, рассеиваемой внутри машины т.е. нужно ограничивать эту энергию иначе машина может сгореть.
‘ + и - ‘ Динамического торможения :
· Не требуется энергии от сети при реализации торможения, но требует существенных изменений в схеме включения.
· При наличии момента на валу не дает полной остановки т.е. отсутствие тормозного момента при нулевой скорости.
· Энергия которая гасится в нагрузке за счет двигателя рассеивается внутри двигателя.
‘+‘ Рекуперативного торможения :
· Экономично за счет рекуперации (возврата) энергии, затрачиваемой на торможение, в сеть.
· Не требует изменения в схеме включения.
‘-‘ но не дает остановки до нулевой скорости.
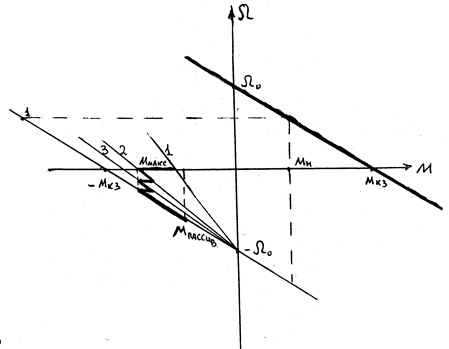
Рис.2
Момент, развиваемый, пропорционален току якоря. Iкз ≈10¸20Iн Þ нельзя на естественной характеристике допускать режимы короткого замыкания ( мы допускаем 2-3 номинальных тока).
(см. рис.) Если поменяли полярность, то перешли на нижнюю характеристику Þ мы резко переходим в точку 1 и потом рекуперативное торможение ® вниз по характеристике, где мы остановимся? В
Так как у нас ток при переключении будет превосходить Iн в 30 раз Þ этого делать нельзя.
Как поступать ® ограничиваем зону до Мmax Þ надо ввести Rдобавочн. в момент переключения, которое изменит естественную характеристику и еще дополнительно ввести ступени противовключения, которые ограничат ток при перебросе (1,2,3).
Исполнительные двигатели систем являются устройствами для преобразования энергии, поэтому можно говорить о статических характеристиках мощности на выходе этих устройств.
Под входной мощностью ИД постоянного тока понимается мощность электрическая, подаваемая на зажимы якорной цепи машины, при этом считается, что обмотка возбуждения машины создает лишь условия для преобразования энергии; в частном случае возбуждение машины может быть от постоянных магнитов и энергии вообще не потреблять.
Под выходной мощностью ИД постоянного тока понимается механическая мощность на валу машины или механическая мощность без учета трения. (Эти понятия условны).
Под характеристикой мощности понимают ее зависимость от одной из ее сопряженных, обобщенных координат в различных режимах работы.
В качестве таких режимов при построении характеристик мощности наиболее интересными являются:
1. Режим работы на одной характеристике (т.е. при постоянных значениях управляющих воздействий).
2. Режим регулирования скорости при управлении по цепи якоря при постоянном моменте (при постоянном возбуждающем воздействии).
3. Режим стабилизации скорости вращения вала электродвигателя при управлении по цепи якоря и варьировании возмущающего момента.
Лекция от 29.03.00 (Лисаконов)
1-й режим
![]() ,
где NЭЛ – электрическая мощность.
,
где NЭЛ – электрическая мощность.
Электрическая мощность в таком виде справедлива только для постоянного тока.
![]() ,
где M – момент
,
где M – момент
(UЯ=const, UВ=const)

Варьируя момент на валу двигателя, варьируют ток.
Ось абсцисс – характеристика динамического торможения.

(1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.