5) по регулируемой координате движения:
· позиционный привод (система)
· скоростной
· моментный
6) электропривода по роду тока:
· постоянного тока
· переменного тока
· шаговый привод
7) гидропривода по роду рабочей жидкости:
· с масляной основой
· с синтетической основой
· на воде
8) по виду устройства управления двигателя (усилителя мощности):
электропривода
· электромашинные
· теристорные
· транзисторные
· с вентильным управлением
· гидропривода
· объёмного регулирования
· дроссельного регулирования
9) по основной схеме построения (закону управления):
привода программного управления (разомкнутого типа)
замкнутого типа (следящие – используют принцип управления по отклонению)
10) по схеме построения аналитической части привода встречаются несколько видов.
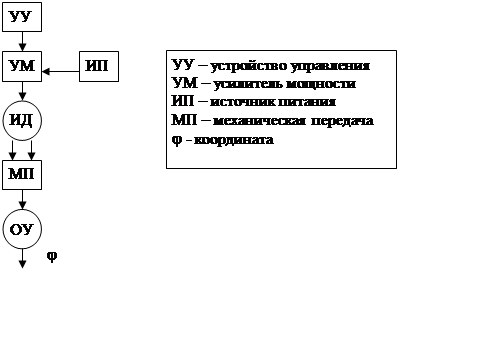
1) индивидуальный однодвигательный привод – привод, в котором одной координатой движения объекта управления управляет один исполнительный двигатель системы.
 |
2) индивидуальный многодвигательный привод – привод, в котором одной координатой движения одного объекта управления управляют несколько исполнительных двигателей.
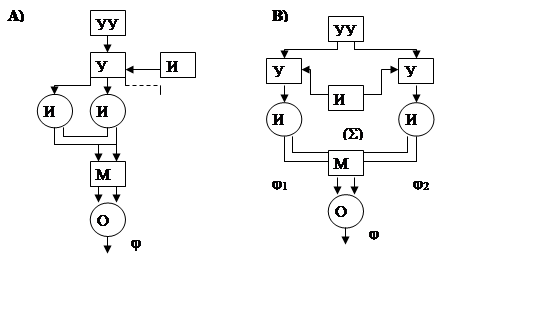 |
На схеме В:
МД – механический дифференциал (сумматор углов)
j1 и j2 – координаты первого и второго исполнительных двигателей
![]()
![]()
Если двигатели
вращаются в разные стороны, то ![]()
Вариант А) с двумя исполнительными двигателями выигрывает у варианта с одним исполнительным двигателем в плане компоновки (мощность ИД=ИД1+ ИД2, а ИД1 и ИД2 меньше по габаритам).
Вариант с двумя исполнительными двигателями может быть дороже, но по сущности выполняет туже задачу.
Одним из основных показателей
приводов является диапазон регулирования – отношение максимально
возможной скорости движения объекта к минимальной скорости плавного движения.![]() ,
,
Где знаком «=» обозначается плавное движение.
Для хорошего качественного привода диапазон регулирования равен 1 или нескольким тысячам.
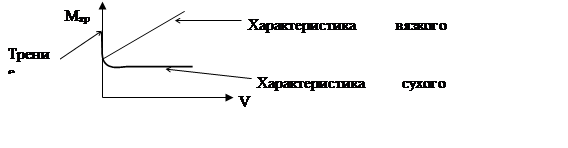
Характеристика трения на валу двигателя:
Почти во всех машинах есть обратная связь по скорости.
 |
Схема В) позволяет сохранять моменты, но увеличить диапазон скоростей (увеличить максимальные скорости и уменьшить минимальную скорости)
3) групповой привод – привод, в котором одной координатой движения нескольких объектов управляет один двигатель.
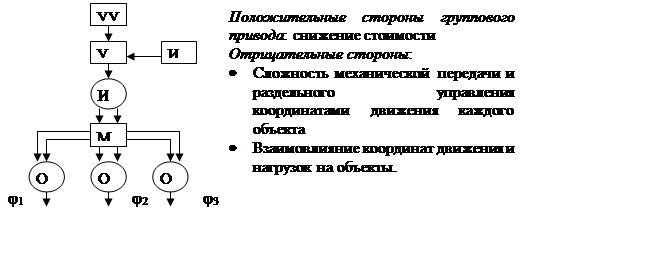 |
Такие схемы используются, например, в машиностроении (станок).
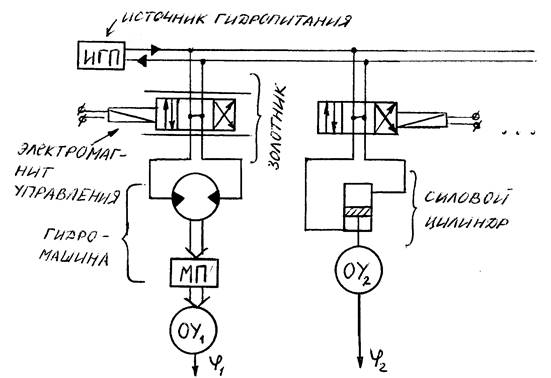
Существует несколько разновидностей группового привода, например, гидропривод с единой питающей установкой, упрощённая схема которого приведена ниже.
4) многокоординатный привод (система приводов) – привод, у которого несколькими координатами движения одного объекта управляют несколько приводов, которые взаимосвязаны. Получается более высокое качество, чем у приводов несвязанного управления.
Такой привод используется при управлении движением объекта со многими степенями свободы, например, привод горизонтального и вертикального наведения.
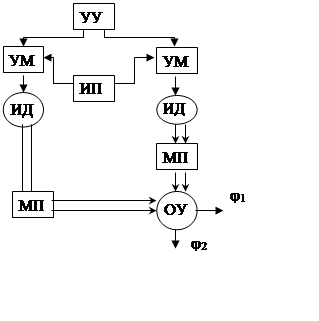 |
Устройство управления обеспечивает взаимосвязанное управление приводами.
Классификация элементов ИОП:
1) основные
2) элементы вспомогательных подсистем.
Основные элементы в подсистеме решают основную задачу, для которой создавалась эта система.
Вспомогательные элементы обеспечивают работоспособность, включение, защиту и т. п. основных элементов системы.
1) к основным элементам относятся:
· исполнительные двигатели
· усилитель мощности или управляемый преобразователь энергии
· усилители сигналов по уровню
· устройство управления
· измерительные устройства
· задающие устройства
· механические передачи основного контура.
2)вспомогательные элементы:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.