для цепи якоря ![]()
для цепи возбуждения ![]()
для ЭДС ![]() ,
где
,
где ![]() при
при
![]() и
и
![]() при
при
![]() .
.
Эта система уравнений позволяет
представить свойства ИД, в том числе в динамическом режиме работы, при принятых
нами допущениях. Решая эту систему уравнений относительно скорости вращения
вала ИД мы можем получить уравнения движения ИД, под которым понимается
нелинейное дифференциальное уравнение, связывающее выходные переменные
двигателя с воздействиями, управляющим ![]() и
возмущающим
и
возмущающим ![]() .
Такое уравнение может быть представлено в следующем виде:
.
Такое уравнение может быть представлено в следующем виде:
![]()
Введем обозначения:
![]()
Тогда последнее уравнение можно представить с следующем виде:
![]()
Перейдем в этом уравнении от переменных по времени к их изображению по Лапласу:
 , где S – комплексная переменная преобразования Лапласа.
, где S – комплексная переменная преобразования Лапласа.
Этот переход позволяет получить переходную функцию, т.е. отношение изображений выходной переменной к входной, при нулевых начальных условиях , отсутствии или постоянстве других воздействий.
![]()
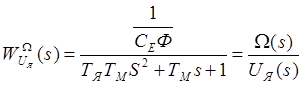 - это переходная функция по управляющему воздействию.
- это переходная функция по управляющему воздействию.
![]() - это переходная функция по возмущающему воздействию.
- это переходная функция по возмущающему воздействию.
Знаменатель переходной функции определяет собственное движение объекта, а числитель определяет вынужденное движение объекта.
Лекция от 19.04.00 (Живолуп)
Временные характеристики двигателя.
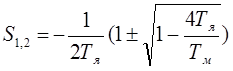
Рассмотрим характеристическое уравнение:
![]()
Весьма существенную роль играет
отношение: ![]() ,
существенно влияет на вид характеристик.
,
существенно влияет на вид характеристик.
Возможны следующие случаи:
1. ![]() -
корни характеристического уравнения вещественные, решение соответствующего
дифференциального уравнения может быть представлено:
-
корни характеристического уравнения вещественные, решение соответствующего
дифференциального уравнения может быть представлено:
 ,
где
,
где ![]() ,
,
![]()
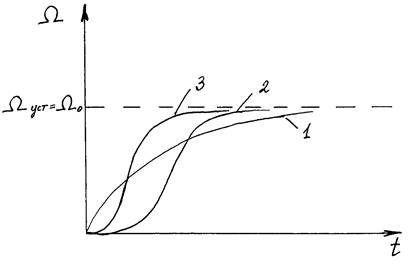
Построим эту характеристику:
![]() ,
,
![]() ,
где СеФ – скорость идеального холостого хода.
,
где СеФ – скорость идеального холостого хода.
Если Тя очень мало, т.е. при ![]() зависимость
(1), при
зависимость
(1), при 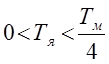 зависимость
(2). Чем меньше постоянные времени, тем короче время переходного процесса, т.е.
если Тм и Тя – малы, то зависимость (3). Чтобы уменьшить
время переходного процесса, необходимо уменьшать одновременно Тм и Тя.
Но т.к.
зависимость
(2). Чем меньше постоянные времени, тем короче время переходного процесса, т.е.
если Тм и Тя – малы, то зависимость (3). Чтобы уменьшить
время переходного процесса, необходимо уменьшать одновременно Тм и Тя.
Но т.к.  ,
а
,
а ![]() ,
то уменьшая Тм (делаем меньше Rя),
увеличиваем Тя.
,
то уменьшая Тм (делаем меньше Rя),
увеличиваем Тя.
2. 4Тя>Тм – корни характеристического уравнения комплексно-сопряжённые, они дают решение дифференциального уравнения в виде затухающих гармонических функций или процессов.
 ,
где Т – общая постоянная времени.
,
где Т – общая постоянная времени.
При комплексно-сопряжённых корнях характеристическое уравнения имеет вид:
![]() ,
где
,
где  ,
,
![]()
Такое характеристическое уравнение говорит о процессе как о колебательном, если x<1.
Характеристическое уравнение можно представить: (T1S+1)(T2S+1)
Таким образом разные сочетания параметров дают разные характеристики.
Для динамических временных характеристик исполнительных двигателей используются также динамические механические характеристики, которые при определённых условиях могут рассматриваться как фазовые портреты двигателя.
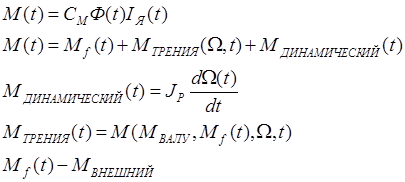
Уравнение моментов на валу двигателя при принятых допущениях:
 ,
где Мэм – электромагнитный момент, Мf
– момент внешних сил если Мf=0, то
,
где Мэм – электромагнитный момент, Мf
– момент внешних сил если Мf=0, то ![]()
Строим механическую характеристику:
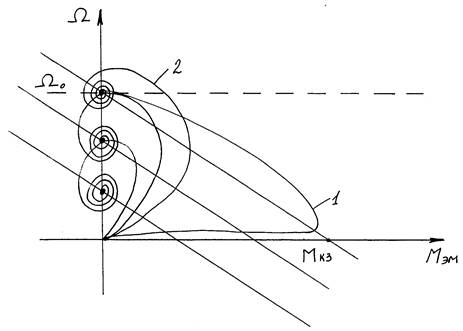
Мкз – момент короткого замыкания. При резкой
подачи напряжения, ток возникает постепенно, он нарастает и его максимум ниже Мкз.
Чем меньше Тя, тем ближе приближаемся к статической характеристике.
Во втором случае (4Тя>Тм) зависимость (2), для первого
случая (![]() )
характерна зависимость (1).
)
характерна зависимость (1).

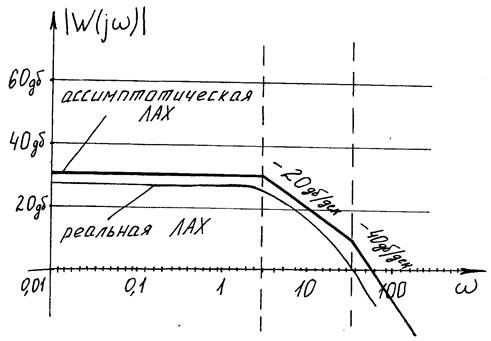
Частотные характеристики.
Амплитудно-частотные характеристики можно построить по частотным передаточным функциям, они по форме совпадают с обычными, но при их получении используется не преобразование Лапласса, а преобразование Фурье, где переменная – частота.
![]() {(jw)2=-w}
{(jw)2=-w}
Амплитудно-частотная характеристика – зависимость амплитуды выходного сигнала от частоты входного сигнала.
Выделяют из частотной
характеристики модуль ![]() и
фазу j, строят зависимости:
и
фазу j, строят зависимости:
1. (T1S+1)(T2S+1)
![]() ,
,
![]()
Логарифмический масштаб.
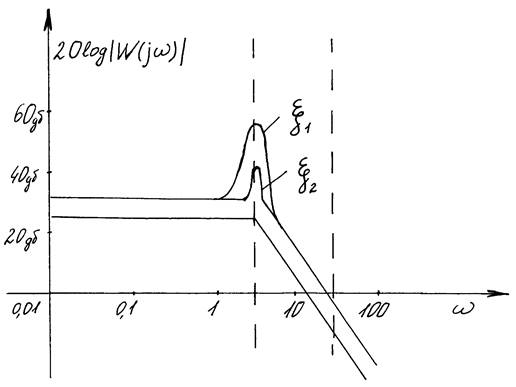
2. ![]() ,
x1<x2
,
x1<x2
Уравнение движения, системы уравнений, передаточные характеристики – это динамические модели. Удобная форма представления динамических моделей – динамические структурные схемы, которые допускают формальное преобразование, что позволяет получить наглядное представление о динамических свойствах как всего объекта, так и основных его цепей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.