Рис. 6
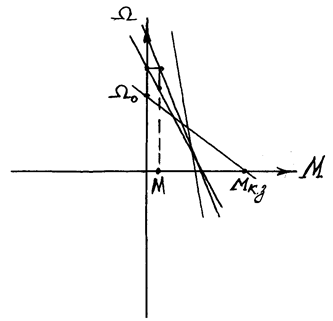
Эта характеристика характеризуется модулем статической жесткости.
Угол наклона прямой определяет коэффициент:
 .
.
При понижении потока машины:
а) если реакция якоря мала, то характеристика практически не изменится б) если реакция якоря изменится значительно, см. на графике три другие прямые под другим наклоном.
Лекция от 22.03.00 (Логинов)
Под режимом работы ИД будем понимать вектор управляющих и возмущающих воздействий на ИД.
Воздействия на ИД также называются параметрами режима.
Для двигателя постоянного тока:
Управляющими воздействиями являются напряжения на зажимах обмоток якоря; возмущающим воздействием – момент нагрузки на валу Д.
Для гидравлических двигателей:
Управляющее воздействие – расход рабочей жидкости на штуцерах машины.
Управляющее воздействие – расход газовой смеси на штуцерах и параметры регулирования.
Возмущающие воздействия – момент на валу или усилие на штоке.
1. По закону изменения параметров режима
1.1 Статические режимы функционирования – т.е. режимы работы с неизменными значениями параметров режима.
· Режимы холостого хода (Мнагр = 0)
· Короткого замыкания (Ωвала = 0)
· Режимы работы на естественной характеристике
· Режимы работы на искусственной характеристике
1.2 Динамические режимы – т.е. режимы с изменяющиеся во времени параметрами режима.
· Детерминированные режимы (характер изменения з-на движения описывается математической моделью)
· Случайные
Детерминированные:
1) Типовые
- это режимы работы при скачкообразном изменении воздействия
- линейном изменении воздействия
- гармоническом изменении воздействия
2) Нетиповые
- воздействие изменяется по заданному закону, не относящемуся к выше перечисленным
Случайные:
1) Случайные по управляющему воздействию
2) Случайные по возмущающему воздействию ( как правило)
2. По решаемой задаче в системе, режимы
2.1 Наведения или переброса.
2.2 Слежения.
2.3 Стабилизации.
3. По направлению энергии
3.1 Двигательные режимы
3.2 Тормозные режимы
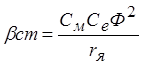
Если вектор момента, развиваемый исполнительным двигателем, совпадает по направлению с вектором скорости вращения вала двигателя – эти режимы называются двигательными.
Если вектор момента, развиваемый исполнительным двигателем, противоположен вектору скорости вращения вала двигателя – эти режимы называются тормозными.
Рис1.
Тормозные режимы подразделяются на 3-и типа:
1) Торможение противовключением
2) Динамическое торможение
3)
 |
(3) – торможение противовключением, (4) – рекуперативное торможение;
(3) и (4) – условия разделения тормозных режимов
(5) – режим динамического торможения
(как ввести этот режим)
1. Создать момент на валу больший момента короткого замыкания.
2. ![]() При
заданном моменте на валу: если плавно понизить Uя Þ перейдем на искусственную характеристику Þ перейдем от динамического торможения в
режим торможения противовключением.
При
заданном моменте на валу: если плавно понизить Uя Þ перейдем на искусственную характеристику Þ перейдем от динамического торможения в
режим торможения противовключением.
Если скачком изменить напряжение на обмотке якоря Uя Þ скорость резко измениться не сможет Þ перейдем на искусственную характеристику в область рекуперативного торможения, затем скорость будет медленно падать Þ переход в область динамического торможения и затем уже только в режим торможения противовключением.
3. 
![]() Введение
добавочного сопротивления Þ изменение
наклона естественной характеристики Þ
переход от динамического торможения в торможение противовключением,
Введение
добавочного сопротивления Þ изменение
наклона естественной характеристики Þ
переход от динамического торможения в торможение противовключением,
Ω
 |
![]() М
М
этого же можно добиться изменением потока Φ<Φноминал Þ изменение напряжение на обмотках возбуждения:
Ω
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.