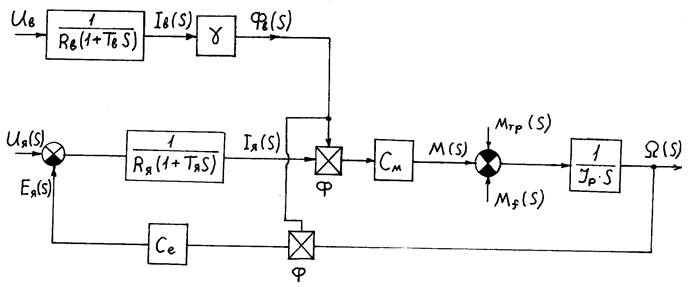
Простейшим видом структурных схем ДПТ являются структурные схемы, полученные на базе передаточных функций управляющего (Uя(S)) и возмущающего (Mf(S)) воздействий.
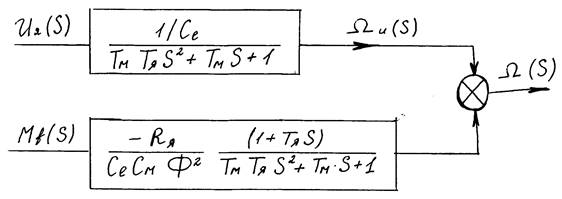
Такая схема не даёт дополнительной информации, а если структурную схему построить на базе системы уравнений, она даст всю информацию о двигателе и его ветвях. Построим такую схему, для этого преобразуем систему:
![]()
![]()
![]()
![]()
![]()
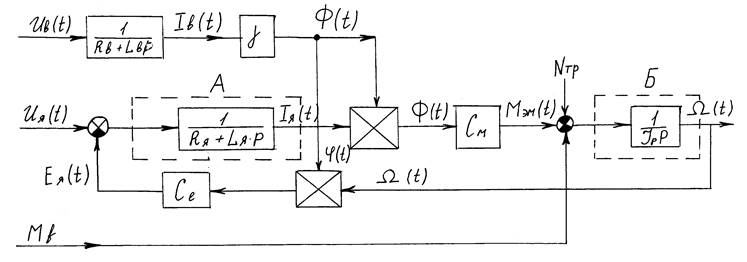
А
= -
этот блок характеризует процессы, происходящие в обмотках якоря.
-
этот блок характеризует процессы, происходящие в обмотках якоря.
Б
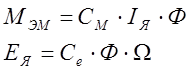
= ![]()
e(t) – угловое ускорение
a - угол поворота ротора

Лекция от 26.04.00 (Лисаконов)
(1)
Попробуем, используя эту структурную схему, получить передаточную финкциию по любому из воздействий.
UВ = const ® Ф = const
Mf = 0
MТР = 0
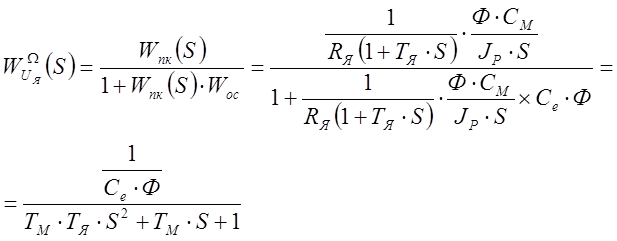
ОС – обратной связи
ПК – прямой канал
Обратный однозначный переход к структурной схеме невозможен, так как структурная схема даёт более детальное описание работы системы.
При UВ = 0 – динамическое торможение.

По входу UВ мы из этой структурной схемы передаточную функцию получить не можем, так как поток ФВ(S) будет меняться (не будет константой Ф).
Для того, чтобы написать передаточную функцию по этому входу, необходимо линеаризовать.
Надо разложить их в ряд Тейлора и ограничиться линейными членами разложения. Разложение Тейлора требует выбора рабочей точки, в которой осуществляется это разложение.
Зададим рабочую точку: UВ0; UЯ0; Мf0.
Получим: Ф0; ЕЯ0; IЯ0; W0.
Теперь мы можем записать уравнения в отклонениях:
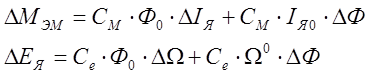
Обозначим:

Для отклонений сигналов от их установившихся значений в выбранной рабочей точке, мы можем перестроить структурную схему в следующем виде:
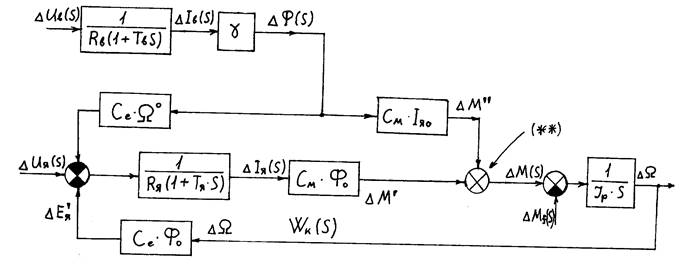
(2)
Это линеаризованная динамическая модель двигателя постоянного тока с независимым возбуждением. Она позволяет получить передаточную функцию по любому из входов. Попробуем записать и проанализировать эту передаточную функцию.
Структурные схемы позволяют делать эквивалентные преобразования. Структурные схкмы допустимо строить в частотнойобласти, в области преобразования по Лапласу и временной области.
Перенесём (** - сумматор) в начало.
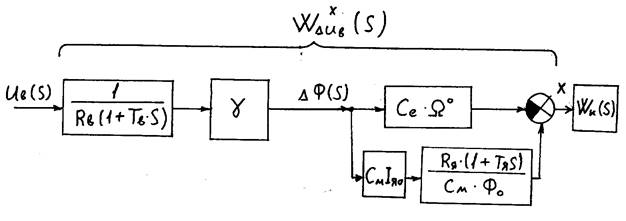
(3)
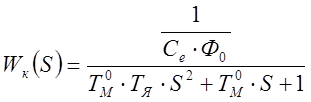

Тогда:
 ,
где
,
где
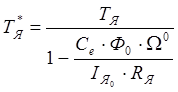 (>>TЯ)
(>>TЯ)
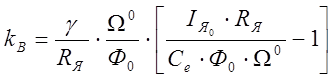
kВ – коэфициент передачи. Он зависит от выбранной рабочей точки и при определении момента нагрузки он может быть как положительным, так и отрицательным.

(4)
Поэтому этот вход для управления неудобен. Обычно используют вход UЯ. Последняя схема будет работать только при малых изменениях заданных постоянных значений.
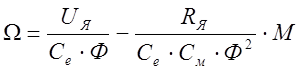
Для двигателей с последовательным возбуждением цепи возбуждения и якоря объединены, и поэтому ток якоря является током возбуждения и наоборот. Это вызывает существенные особенности работы машины. В частности, малое возбуждение при скоростях, близких к холостому ходу, то есть низких нагрузках. Когда малый поток возбуждения увеличивает скорость – машина идёт в разнос.
![]()
(5)
Управлять такими двигателями неудобно, и поэтому их редко используют в мехатронных системах.
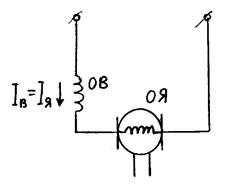
При рассмотрении свойств исполнительного двигателя постоянного тока мы убедились, что наиболее удобным с точки зрения пропорционального управления является способ управления двигателем по цепи якоря. Однако эта цепь машины является сильноточной, то есть энергетически более мощной, чем цепь возбуждения. Поэтому при управлении якорем требуются специальные устройства – усилители мощности (преобразователи мощности), причём управляемые. К таким устройствам относятся электромашинные усилители мощности, которые широко используются до настоящего времени, а также, появившиеся недавно полупроводниковые (терристорные и другие) преобразователи. Одной из основных схем привода с электромашинными усилителями является схема системы генератор-двигатель.
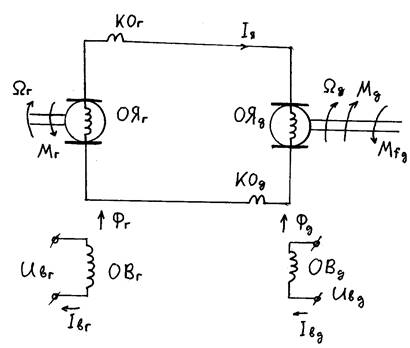
(6)
КО – компенсационная обмотка.
Система состоит из двух машин постояного тока независимого возбуждения, якорные цепи которых объеденены как показано на схеме.
Подобная система может использоваться в двух вариантах:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.