И , наконец, по функциональной схеме можно составить структурную схему, представленную на рис.1.1.3.
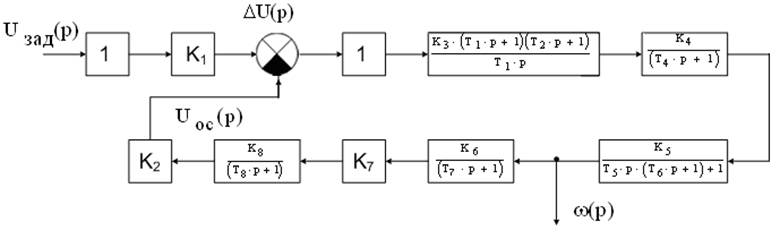
Рис.1.1.3. Линеаризированная структурная схема по функциональной схеме на рис.1.1.2.
На схеме обозначено:
1;1 – коэффициенты передачи ЗИ и АLА ,
К1;К2 – коэффициенты передачи УС,
К3; Т1; Т2 – коэффициент передачи и постоянные времени ПИД (пропорционально-интегрально-дифференциального)-регулятора,
К4; Т4 – коэффициент передачи и постоянная времени тиристорного преобразователя,
К5;Т5;Т6 – коэффициент передачи и постоянные времени электродвигателя,
К6; Т7 – коэффициент передачи и постоянная времени тахогенератора,
К7 – коэффициент передачи датчика скорости.
К8; Т8 – коэффициент передачи и постоянная времени фильтра.
1.2.Основы операторно-частотного метода анализа и синтеза САУ.
Анализ и синтез САУ производят по математическим моделям с помощью различных методов, приемов, критериев и правил.
Наиболее распространенными способами математического описания САУ
для анализа и синтеза ее являются дифференциальные уравнения, матричные уравнения и структурные схемы, являющиеся по существу графической интерпретацией дифференциальных уравнений в операторной форме ( чаще всего по Лапласу).
Далее нами будет использоваться матмодель САУ в виде структурной схемы, для построения которой необходимо знать передаточные функции элементов, как было показано в п.1.1.
Рассмотрим ряд примеров получения передаточных функций элементов САУ.
Пример 1.2.1.
Найти передаточную функцию регулятора, построенного на операционном усилителе по схеме на рис.1.2.1., где обозначено : Z1(p) и Z2(p) - операторные сопротивления входное и обратной связи.

Рис. 1.2.1. Операторная схема регулятора на операционном
усилителе ( вариант 1 ).
По методу узловых потенциалов, считая, что в идеальном операционном усилителе ( ОУ ) Rвх→∞ и Rвых→0, можно записать:
Для идеального ОУ коэффициент усиления kоу→∞, тогда получим

или

и окончательная передаточная функция будет
 .
.
Пример 1.2.2.
Найти передаточную функцию регулятора, построенного на операционном усилитиле по схеме на рис. 1.2.2., где имеются дополнительные операторные сопротивления делителя Z3(p) и Z4(p).
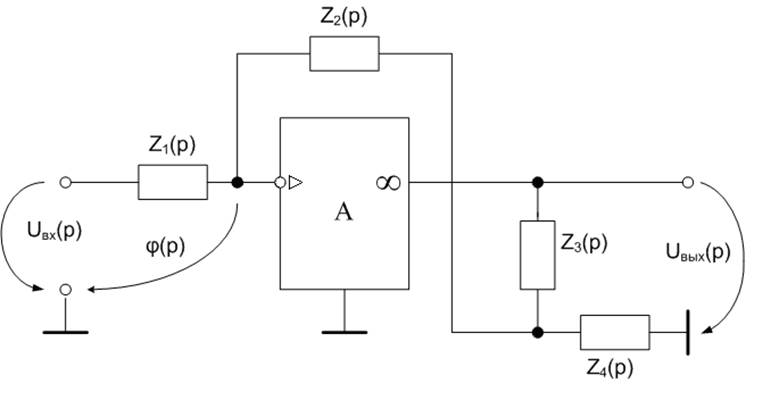
Рис.1.2.2. Операторная схема регулятора на операционном
усилителе ( вариант 2 ).
Аналогично предыдущему запишем:
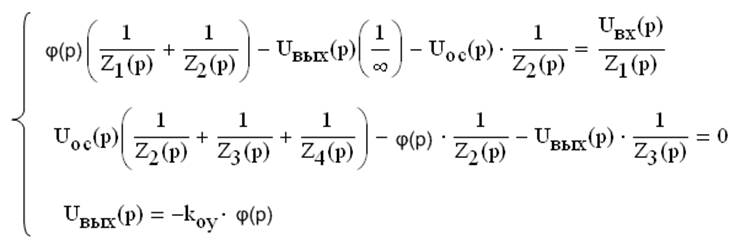
из первого уравнения при kоу→∞ получаем
 ,
,
тогда второе
 .
.
Отсюда можно получить передаточную функцию  , так как обычно |z2(p)|>>|z3(p)+z4(p)|.
, так как обычно |z2(p)|>>|z3(p)+z4(p)|.
Пример 1.2.3.
Найти передаточную функцию
пропорционально-интегрального (ПИ) регулятора по схеме варианта 1(рис 1.2.1),
для которого  .
.
Согласно полученного в примере 1.2.1  .
Обозначая
.
Обозначая
 – коэффициент передачи регулятора,
– коэффициент передачи регулятора,
![]() – постоянная времени регулятора, запишем передаточную
функцию регулятора в виде
– постоянная времени регулятора, запишем передаточную
функцию регулятора в виде
 .
.
1.3. Преобразование структурных схем.
Начертание структурных схем можно упростить путем свертывания(“Упрощения”) их по правилам, приведенным в таблице 1.3.1.
Доказательства этих правил можно пояснить следующим.
Для последовательного соединения 3х звеньев
 .
.
Для параллельного соединения 3х звеньев

Правила в таблице 1.3.1. основные, так как они позволяют построить ряд частных, полезных, но редко используемых на практике правил.
Рассмотрим использование правил структурных преобразований на примере определения передаточной функции канала “момент – скорость” двигателя постоянного тока с независимым возбуждением по структурной схеме, полученной в дисциплине “Основы математического моделирования”.
Таблица 1.3.1.
Пример 1.3.1.
С помощью правил структурных преобразований
найти передаточную функцию  по структурной схеме канала ДПТ НВ.
по структурной схеме канала ДПТ НВ.
Рис 1.3.1. Структурная схема канала “момент – скорость” ДПТ НВ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.