Элемент САУ– конструктивно обособленная часть САУ, выполняющая определенную самостоятельную функцию по управлению объектом регулирования.
Стрелки показывают направление передачи информации с помощью сигналов.
Сигнал – физическая величена (напряжение, ток, перемещение, давление, тепловое излучение,…), несущая информацию (сигнализирующая) о состоянии элементов САУ.
На функциональных схемах САУ обозначено:
![]() – управляющий сигнал,
– управляющий сигнал,
![]() – регулируемая величина (сигнал),
– регулируемая величина (сигнал),
![]() -- возмущающий сигнал (воздействие),
-- возмущающий сигнал (воздействие),
![]() – сигнал ошибки регулирования
(отклонение, рассогласование).
– сигнал ошибки регулирования
(отклонение, рассогласование).
Эти сигналы имеют обычно различную физическую природу, поэтому далее будем в аналитических преобразованиях считать их относительными
В разомкнутых САУ
сигналы ![]() и
и ![]() никак не влияют на управляющий сигнал
никак не влияют на управляющий сигнал ![]() или АР (рис. В.3.3 а), а в
замкнутых САУ влияют (рис. В.3.3 б, в, г), так как каналы передачи сигналов
образуют контуры.
или АР (рис. В.3.3 а), а в
замкнутых САУ влияют (рис. В.3.3 б, в, г), так как каналы передачи сигналов
образуют контуры.
Если в процессе
управления (обычно цель регулирования ![]() ≡
≡![]() ) учитывается, а затем
компенсируется возмущение f, то такой подход называется принципом
Понселе, регулированием по возмущению. (рис. В.3.3 б).
) учитывается, а затем
компенсируется возмущение f, то такой подход называется принципом
Понселе, регулированием по возмущению. (рис. В.3.3 б).
Если же в процессе
управления ![]() сравнивается с
сравнивается с ![]() , а затем отклонение
, а затем отклонение ![]() компенсируется (устремляется к
нулю), то такой подход называется принципом Ползунова—Уатта, регулированием по
отклонению (рис. В.3.3. в).
компенсируется (устремляется к
нулю), то такой подход называется принципом Ползунова—Уатта, регулированием по
отклонению (рис. В.3.3. в).
Здесь: СУ –
сравнивающее устройство; ОС – обратная связь; ![]() –
сигнал обратной связи.
–
сигнал обратной связи.
В случае объединения обоих принципов получается комбинированное регулирование
(рис. В.3.3. г).
Пример В.1. Построение системы стабилизации частоты вращения электродвигателя постоянного тока по принципу Понселе (регулирование по возмущению).
На рисунке В.3.4 представлена блок-схема САУ, реализованная по принципу регулирования по возмущению.
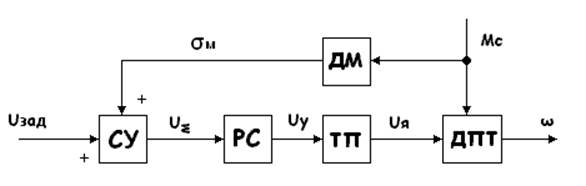 |
Рис. В.3.4 Блок-схема автоматизированного электропривода, реализованного по принципу Понселе.
Здесь обозначено:
ДПТ –
электродвигатель постоянного тока (объект регулирования); ТП – тиристорный
преобразователь (автоматический регулятор с коэффициентом передачи Кmп); ДМ – датчик момента сопротивления ![]() (измеритель возмущения с
коэффициентом передачи К∂м); СУ – суммирующее устройство; РС – регулятор
скорости с коэффициентом передачи
(измеритель возмущения с
коэффициентом передачи К∂м); СУ – суммирующее устройство; РС – регулятор
скорости с коэффициентом передачи ![]() ;
; ![]() – напряжение задания (входной сигнал);
– напряжение задания (входной сигнал); ![]() -- угловая скорость вращения якоря ДПТ (выходной
сигнал);
-- угловая скорость вращения якоря ДПТ (выходной
сигнал); ![]() U∂М,UΣ,Uя – промежуточные напряжения (сигналы).
U∂М,UΣ,Uя – промежуточные напряжения (сигналы).
Без системы управления в установившемся режиме ДПТ НВ по якорной цепи описывается уравнением
 ,
,
где ![]() –
момент сопротивления (нагрузки) на валу;
–
момент сопротивления (нагрузки) на валу; ![]() – номинальный магнитный поток (const);
– номинальный магнитный поток (const); ![]() – магнитная
постоянная;
– магнитная
постоянная; ![]() – ЭДС
вращения (противоЭДС);
– ЭДС
вращения (противоЭДС); ![]() –
напряжение питания якорной цепи.
–
напряжение питания якорной цепи.
 . (В.1)
. (В.1)
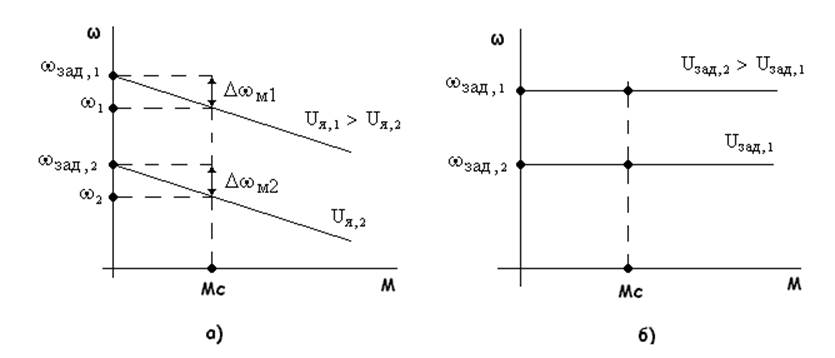
Это уравнение
механической характеристики ДПТ НВ, в котором первое слагаемое представляет
собой заданную скорость ![]() напряжением
напряжением ![]() якорной обмотки (управление или
задание), а второе -- ошибку по скорости
якорной обмотки (управление или
задание), а второе -- ошибку по скорости ![]() (отклонение
от заданной скорости) из-за нагрузочного момента
(отклонение
от заданной скорости) из-за нагрузочного момента ![]() на валу двигателя.
на валу двигателя.
С системой управления по возмущению согласно рис.В.3.4 можно описать ДПТ НВ уравнениями для установившегося режима в следующем виде
 (В.2)
(В.2)
Методом подстановки исключим промежуточные сигналы Uдм, UΣ, Uу, Uя в системе уравнений (В2) и найдем выражение для механической характеристики САУ ДПТ НВ
 . (В.3)
. (В.3)
Видно, что в данном случае можно сделать скоростную ошибку нулевой (Δωм=0), если настроить регулятор так, что бы его коэффициент передачи
 .
.
При этом уравнение механической характеристики примет вид
 . (В.4)
. (В.4)
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.