Наличие в САУ не только контуров для управляющих сигналов, но и контуров по возмущающим воздействиям позволяет построить инвариантные САУ, в которых регулируемые величины “не чувствуют” возмущающих воздействий.
 |
Рис. В.3.8. Функциональные схемы трехконтурных САУ автономной (а), с общим отклонением (б), подчиненного регулирования (в) и двухконтурной комбинированной (г)
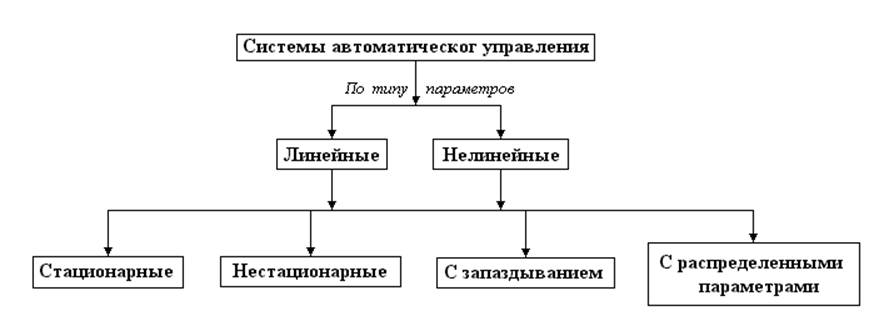
В.3.3. Классификация по характеру параметров САУ
 |
 – коэффициент
передачи, а переходной постоянная времени
– коэффициент
передачи, а переходной постоянная времени Рис. В.3.9. Фрагмент общей схемы классификации САУ.
Линейными (нелинейными) называются САУ, состоящие из элементов с линейными (нелинейными) характеристиками (рис. В.3.10).
 |
Рис. В.3.10. Статические характеристики линейных (а), нелинейных (б) элементов и элементов с зоной нечувствительности (в).
В стационарных САУ параметры элементов не изменяются во времени, а в нестационарных изменяются.
САУ с запаздыванием имеет в своем составе, хотя бы один, элемент, сигнал на выходе которого появляется с задержкой во времени относительно момента подачи входного сигнала. Статическая характеристика такого элемента имеет зону нечувствительности (рис. В.3.10. в).
В состав САУ с распределенными параметрами входят протяженные элементы, параметры которых распределены в пространстве (многозвенные фильтры, линии передачи ВЧ-сигналов, канаты, транспортеры и т.д.).
Пример В.3. Статическая характеристика потенциометрического датчика положения.
Датчик – это элемент САУ, преобразующий неэлектрический сигнал в электрический
В данном примере
будет рассматриваться выполненный на основе переменного резистора
(потенциометра) датчик (рис. В.3.11), преобразующий угловую координату
положения его движка ![]() (входной сигнал) в
электрическое напряжение между движком и одним из концов потенциометра
(входной сигнал) в
электрическое напряжение между движком и одним из концов потенциометра ![]() (выходной сигнал).
(выходной сигнал).
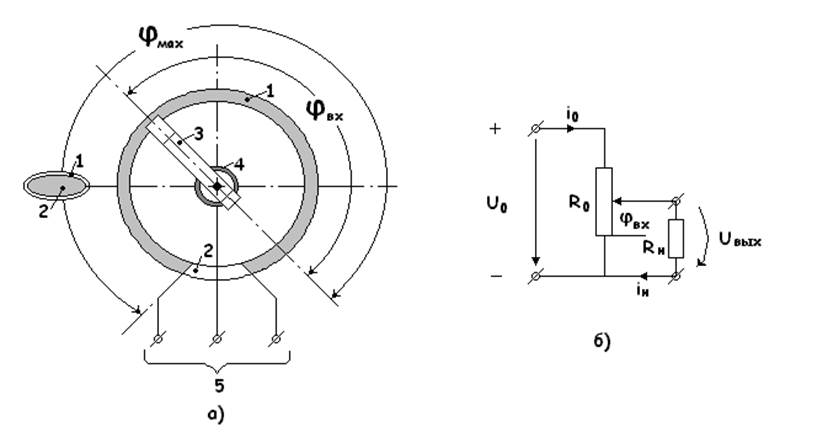 |
Рис. В.3.11. Конструкция (а) и электрическая схема (б) потенциометрического датчика угла: 1-обмотка, 2-диэлектрический каркас, 3-движок, 4-контактное токопроводящее кольцо, 5-выводы концов обмотки и контактного кольца.
Электрическая схема датчика построена при допущениях, что индуктивность L и емкость C обмотки, а также сопротивление R контактов движка пренебрежимо малы.
Кроме того, будем считать, что намотка обмотки выполнена равномерной, а нагрузка (входное сопротивление следующего за датчиком электронного блока) чисто активная.
В этом случае согласно законов Ома и Кирхгофа можно записать систему уравнений
Исключая промежуточную переменную i0, найдем
 .
.
Учитывая, что  , и вводя относительные
величины входного
, и вводя относительные
величины входного  и выходного
и выходного  сигналов, а также полного
сопротивления датчика
сигналов, а также полного
сопротивления датчика  , окончательно получим
уравнение статической характеристики в следующем виде
, окончательно получим
уравнение статической характеристики в следующем виде
 . (В.9)
. (В.9)
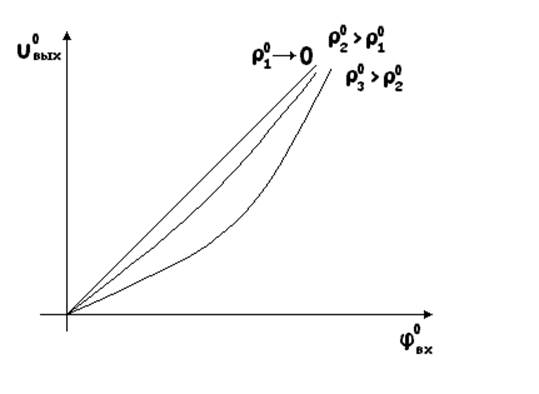 |
Рис В.3.12. Статические характеристики потенциометрического датчика положения.
Анализ соотношения
(В.9) и вид статических характеристик показывает, что при малых нагрузочных
сопротивлениях (![]() ) датчик является
нелинейным элементом, а при больших (
) датчик является
нелинейным элементом, а при больших (![]() ) – линейным со
статической характеристикой
) – линейным со
статической характеристикой ![]() .
.
В связи с этим при проектировании САУ рекомендуется такие датчики подключать к электронным блокам, имеющим входные сопротивления значительно большие, чем сопротивление датчика.
В.3.4. Классификация по характеру (по типу) управляющего сигнала (воздействия).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.