Рис. В.3.5. Механические характеристики ДПТ НВ (а) и САУ управления его скоростью с регулированием по возмущению.
Пример В.2. Построение системы стабилизации частоты вращения электродвигателя постоянного тока по принципу Ползунова—Уатта (регулирование по отклонению).
 |
Рис. В.3.6. Блок-схема автоматизированного электропривода, реализованного по принципу Ползунова—Уатта.
Здесь дополнительно к рис. В.3.6. обозначено:
СУ – сравнивающее устройство, ТГ – тахогенератор, ΔU – напряжение (сигнал) рассогласования, Uтг – напряжение тахогенератора (обратной связи).
В установившемся режиме эту САУ можно описать системой уравнений
 (В.5)
(В.5)
Методом исключения промежуточных переменных получим из (В.5) выражение для механической характеристики данной САУ ДПТ НВ
 . (В.6)
. (В.6)
Из полученного видно, что в данной САУ сделать скоростную ошибку Δωм нулевой при реальных параметрах элементов не удается, но получить ее не более допустимой можно.
Для этого
первоначально надо настроить обратную связь, исходя из теоретически возможного
условия, что при ![]() отклонение
отклонение ![]() .
.
При этом уравнение (В.6) дает расчетное соотношение для требуемого коэффициента передачи обратной связи
 . (В.7)
. (В.7)
Теперь из условия
 , где
, где ![]() – допустимая скоростная ошибка из-за нагрузочного момента
– допустимая скоростная ошибка из-за нагрузочного момента ![]() , можно получить расчетное
выражение для требуемого коэффициента передачи регулятора скорости
, можно получить расчетное
выражение для требуемого коэффициента передачи регулятора скорости
 . (В.8)
. (В.8)
Здесь через ![]() обозначена допустимая относительная скоростная ошибка (статизм).
обозначена допустимая относительная скоростная ошибка (статизм).
Сравнение проиллюстрированных принципов построения САУ показывает, что – лучшим на первый взгляд , оказывается первый, когда скоростную ошибку можно сделать нулевой.
Однако реальных возмущающих воздействий оказывается очень много ( изменение момента нагрузки, колебания напряжения сети электропитания, разогрев обмоток и магнитопровода электродвигателя и т.д ) и чтобы их все учесть приходится вводить большое количество компенсирующих связей.
В тоже время применение даже одной обратной связи по регулируемой величине позволяет не только учесть влияние всех возмущений, но и сделать ошибку нулевой, используя астатические САУ, как будет показано далее.
В.3.2. Классификация САУ по числу регулируемых величин.
Если принять во внимание, что канал – это часть САУ, в котором информация передается в одном направлении, а контур регулирования – это замкнутая часть САУ, образованная несколькими каналами для регулирования одной выходной величины (координаты), то можно осуществить следующую классификацию САУ (рис. В.3.7).
Одноконтурные
САУ имеют один контур регулирования одной величины, образованный каналами
передачи сигналов: прямым (![]() ),
обратной связи (
),
обратной связи (![]() ) и (или) возмущения
(
) и (или) возмущения
(![]() ).
).
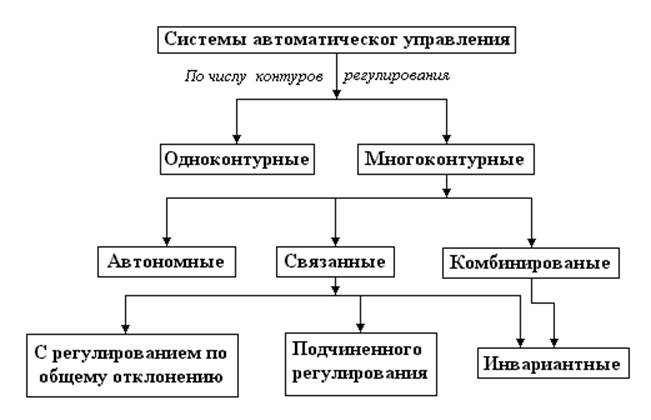 |
Рис. В.3.7. Фрагмент общей схемы классификации САУ.
В многоконтурных САУ (рис. В.3.8) контуры управления могут быть автономными, когда каждый управляющий сигнал воздействует только на одну “свою” регулируемую величину, и связанными, то есть влияющими друг на друга. В последнем случае для заданного изменения одной регулируемой величины требуется изменять несколько управляющих величин, чтобы скомпенсировать взаимосвязь контуров, из-за которой изменение одной управляющей величины приводит к изменению не только “своей”, но и других регулируемых величин.
В САУ подчиненного регулирования контуры управления располагаются один внутри другого (концентрично), причем быстродействие контуров “от центра к периферии” уменьшается. Это позволяет взаимосвязь контуров почти исключить за счет разделения процессов регулирования различных величин по времени.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.