В аналоговых САУ управляющие сигналы непрерывны во времени и могут быть постоянными (медленно меняющимися) и переменными, несущими информацию в величине, знаке, амплитуде, частоте или фазе.
 |
Рис. В.3.13. Фрагмент классификации САУ.
 |
Рис. В.3.14. Аналоговые управляющие сигналы постоянные (а) и переменные (б,в).
В дискретных САУ управляющие сигналы прерывисты во времени и могут квантоваться только по уровню (в релейных), только по времени (в импульсных) или и по уровню и по времени (в цифровых).
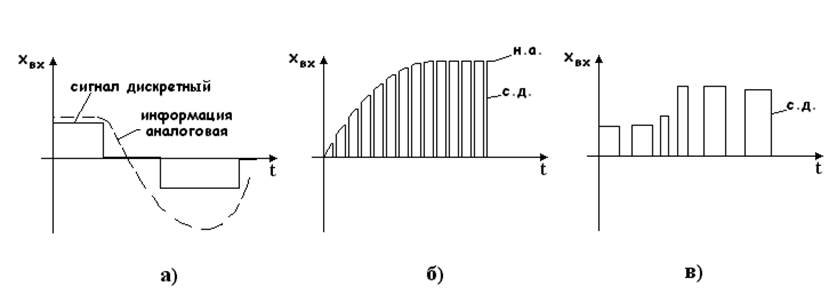 |
Рис. В.3.15 Дискретные управляющие сигналы релейные (а), импульсные (б), цифровые (в).
В релейных САУ
три уровня квантования входного сигнала по величине (![]() ), информация заложена в этих
уровнях.
), информация заложена в этих
уровнях.
В импульсных САУ один уровень квантования входного сигнала по времени (период следования импульсов постоянен), информация может быть заложена в амплитуде (АИМ), ширине (ШИМ) или начальной фазе (ФИМ) импульсов. Иногда в само квантование по времени закладывается информация (ЧИМ).
В цифровых САУ несколько уровней квантования по величине и по времени из-за необходимости “обозначить” число в кодовой форме цифрами единиц, десятков, сотен и т.д. (или в двоичной системе исчисления).
В.3.5. Классификация по типу выходного сигнала (по закону воспроизведения).
Данный подход к
классификации основан на разновидностях законов воспроизведения выходным
сигналом ![]() входного управляющего воздействия
входного управляющего воздействия
![]() .
.
В стабилизирующих
САУ ![]() -- const, в следящих
--
-- const, в следящих
-- ![]() -- var. (причем произвольным
образом), в программных --
-- var. (причем произвольным
образом), в программных -- ![]() --
var. (причем по жестко заданной программе).
--
var. (причем по жестко заданной программе).
 |
В функциональных
САУ ![]() и
и ![]() во
времени также меняются произвольно, но между собой эти сигналы связаны заданной
функциональной зависимостью. Например,
во
времени также меняются произвольно, но между собой эти сигналы связаны заданной
функциональной зависимостью. Например, ![]() .
.
В оптимальных
(экстремальных) САУ ![]() -- var, но
в процессе регулирования поддерживается оптимум по каким-либо техническим
показателям (максимальная точность, наивысшее быстродействие, минимальные
потери, перегрев не выше допустимого и т.д.)
-- var, но
в процессе регулирования поддерживается оптимум по каким-либо техническим
показателям (максимальная точность, наивысшее быстродействие, минимальные
потери, перегрев не выше допустимого и т.д.)
Адаптивные (самонастраивающиеся) САУ выполняют цель регулирования “подстраиваясь” (автоматически) под изменение условий работы или возмущающих воздействий за счет перестройки своих технических характеристик.
Самообучающиеся – это адаптивные САУ, которые “приспосабливаются” к периодически изменяющимся условиям каждый раз лучшим образом, за счет запоминания этих изменений и самообучения (подстройки САУ).
Рассмотренная в разделе В.3 классификация позволяет определится со структурой САУ электропривода и выбрать наиболее подходящие методы ТАУ для ее анализа и синтеза.
В качестве примера местонахождения в рассмотренной классификации САУ электроприводов укажем, что САУ большинства автоматизированных электроприводов РУП “БМЗ” (г.Жлобин) зарубежного исполнения (Simens) выполнены по принципу регулирования по отклонению, имеют два контура регулирования с подчинением, построены на линейных и нелинейных элементах со стационарными параметрами, используют аналоговые управляющие сигналы постоянного тока, предназначены для стабилизации частоты вращения двигателя постоянного тока.
1. Основные методы анализа и синтеза САУ
1.1Условно-графическое представление систем автоматического управления
Выше указывалось , что САУ могут иметь самую различную физическую природу: злектрическую, механическую, гидравлическую, оптическую и т.д.
САУ электроприводов в основном электромеханические .
С целью обобщения и идеализации ( исключение физической сущности ), САУ представляют для анализа или синтеза условно графически в виде
блок-схем,функциональных схем, принципиальных схем и структурных схем.
Блок-схема, функциональная и структурная схемы графически изобра- жаются в виде квадратов, связанных стрелками.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.