1. Описание схемы работы машины
Автобус (рис.1.1,а) приводится в движение двухцилиндровым двухтактным двигателем 1 через коробку передач 2 и трансмиссию 3.
Шестизвенный рычажный механизм двигателя преобразует возвратно-поступательное движение поршней 3, 5 во вращательное движение кривошипа 1. Передача движения от поршней к кривошипу осуществляется через шатуны 2 и 4. В конце такта расширения открываются выпускные клапаны и продувочные окна и продукты горения удаляются из цилиндра. Продувка цилиндров начинается после поворота кривошипа от НМТ на 60о. После продувки начинается второй такт – сжатие воздуха.
Выпускные клапаны отрываются толкателями кулачковых механизмов (рис.1.1,б) в указанные на циклограмме (рис.1.1,е) моменты времени. Кулачки и кривошип вращаются с одинаковой угловой скоростью. Закон движения толкателя показан на рис.1.1, д.
Движение от кривошипа 1 передается на ведущие колеса автобуса через коробку передач и редуктор 4 заднего моста. Коробка передач состоит из ступени внешнего зацепления za, zb и планетарной передачи z1–H (рис. 1.1, г).
Исходные данные для проектирования приведены в табл. 1.1
При расчетах принять:
1. Масса шатуна 2 ![]() ,
,
![]() , где
, где ![]()
![]() ,
,
2. Масса поршня ![]() ,
масса кривошипа
,
масса кривошипа ![]() .
.
3. Центр масс шатуна 2 находится в точке S2: ![]() .
.
4. Моменты инерции звеньев: шатуна 2 ![]() , кривошипа 1
, кривошипа 1 ![]() .
.
5. Максимальный угол давления в кулачковом механизме ![]() .
.
6. Момент инерции коромысла относительно его оси
вращения Н ![]() .
.
7. Расчетный модуль зубчатых колес принять m=2 мм.
8. Число сателлитов не менее 3.
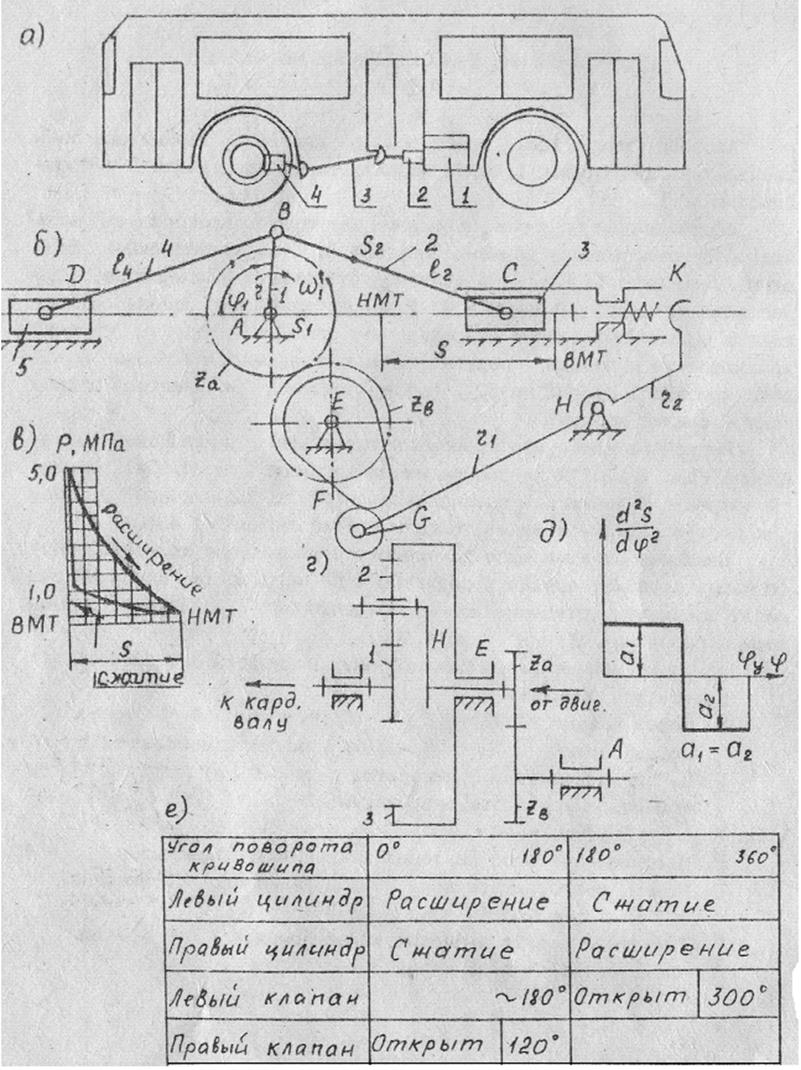
Рис. 1.1
Таблица 1.1
Исходные данные к проекту
|
№ пп |
Параметр |
Обозна-чение |
Размер-ность |
Величина |
|
1 |
Ход поршней 3 и 5 |
Н3=Н5 |
м |
0,16 |
|
2 |
Отношение длин |
|
|
|
|
3 |
Диаметр цилиндров |
d |
м |
0,17 |
|
4 |
Частота вращения кривошипа 1 |
n1 |
об/мин |
3800 |
|
5 |
Коэф. неравномерности вращения кривошипа |
|
0,05 |
|
|
6 |
Угловая координата расчетного положения |
|
град |
210 |
|
7 |
Частота вращения карданного вала |
nk |
об/мин |
600 |
|
8 |
Число зубьев колес |
za zb |
9 18 |
|
|
9 |
Приведенный к водилу момент инерции трансмиссии |
|
|
0,158 |
|
10 |
Угол качания коромысла |
|
град |
24 |
|
11 |
Отношение ускорений толкателя |
|
1,3 |
|
|
12 |
Длина коромысла |
|
м |
0,155 |
|
13 |
Масса коромысла |
|
кг |
1,7 |
2. Задачи и методы исследования
Задачами исследования динамики машинного агрегата в крусовом проектировании являются:
1. Динамический синтез машинного
агрегата по заданному коэффициенту неравномерности вращения ![]() и определение закона движения
ведущего звена (его угловой скорости и углового ускорения).
и определение закона движения
ведущего звена (его угловой скорости и углового ускорения).
2. Оценка динамической нагруженности отдельных механизмов и звеньев, входящих в состав машины. Она оценивается величиной и направлением реактивных сил и моментов сил в кинематических парах.
Результаты решения задач динамического синтеза и анализа машинного агрегата являются исходными для определения динамической нагруженности отдельных звеньев машины.
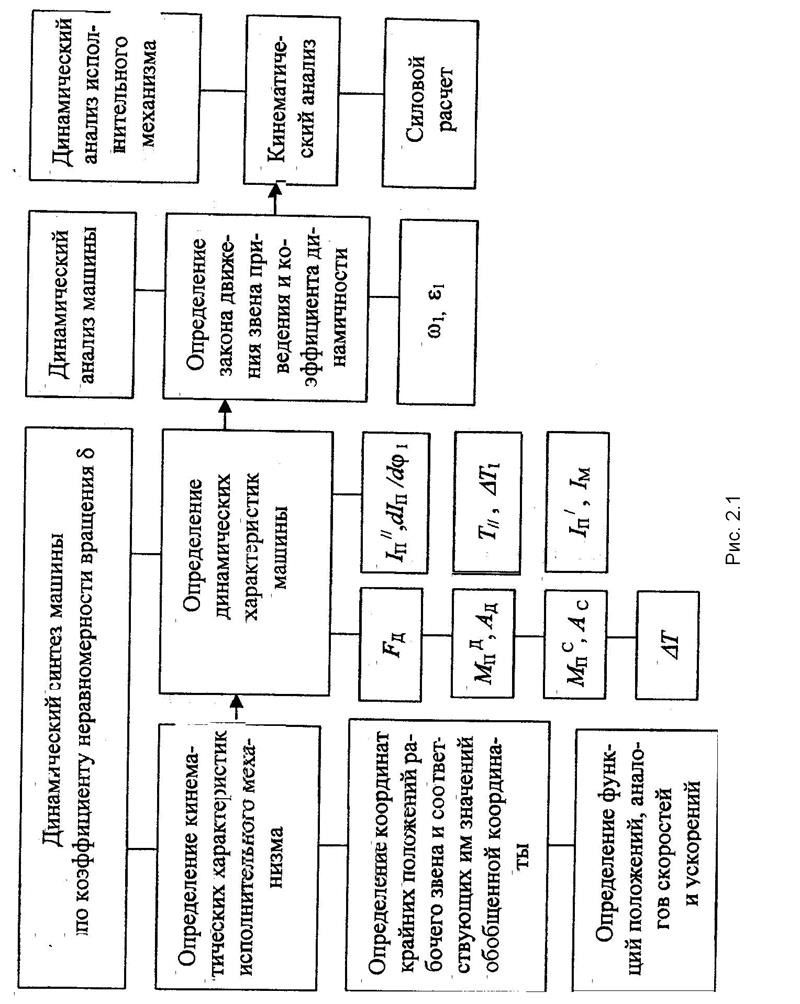
Блок-схема исследования динамики машинного агрегата показана на рис. 2.1. В исследовании выделяют следующие этапы:
1. Исследование динамики машины:
1.1. Определение кинематических характеристик исполнительного механизма. которое включает нахождение крайних положений рабочего органа и соответствующих ему значений обобщенных координат, вычисление функций положений, аналогов скоростей и ускорений для ряда последовательных положений за 1 цикл движения.
1.2. Определение динамических характеристик звена приведения: а) приведенных моментов сил движущих и сил полезного сопротивления;
б) Приведенного момента
инерции (![]() ).
).
1.3. Определение закона вращения звена приведения.
2. Динамический анализ исполнительного механизма:
2.1 Кинематический анализ, включающий определение скоростей и ускорений точек и звеньев с учетом полученного закона вращения звена приведения.
2.2. Силовой расчет, целью которого является определение реакций в кинематических парах уравновешивающего момента.
3. Динамический синтез и анализ машины
3.1. Задачи и методы исследования динамики
машинного агрегата
Динамический синтез и анализ машинного агрегата проводится при установившемся движении, когда скорость главного вала машины остается стабильной в определенных пределах.
Задачей динамического синтеза
машины является определение постоянной составляющей приведенного момента
инерции машинного агрегата ![]() и момента
инерции добавочного маховика
и момента
инерции добавочного маховика ![]() , при которых
изменения угловой скорости звена приведения за цикл установившегося движения не
превышают значений, обусловленных коэффициентом неравномерности
, при которых
изменения угловой скорости звена приведения за цикл установившегося движения не
превышают значений, обусловленных коэффициентом неравномерности ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.