Задачей динамического анализа
движения машины является определение закона движения звена приведения, т.е.
его угловой скорости и углового ускорения (при полученном значении ![]() ).
).
Основными методами расчета
являются графоаналитический метод планов и графический метод диаграмм.
Динамические расчеты проводятся по упрощенной динамической модели. Динамический
синтез и анализ машинного агрегата выполняются методом Н.М. Мерцалова по
диаграмме ![]() . Основным наиболее энергоемким
механизмом в машине является рычажный механизм двигателя, с которого и
начинается расчет.
. Основным наиболее энергоемким
механизмом в машине является рычажный механизм двигателя, с которого и
начинается расчет.
3.2. Структурный анализ рычажного механизма
Задачами структурного анализа являются: определение степени подвижности механизма, выявление и устранение избыточных связей и лишних степеней свободы, определение класса и построения механизма.
Структурная схема рычажного механизма (при входном звене 1) представлена на рис. 3.1. Звенья механизма: 1 – кривошип (коленвал), 2 и 4 – шатуны, 3 и 5 – ползуны (поршни), 6 – стойка (блок цилиндров, рама автобуса). Число подвижных звеньев n=5.
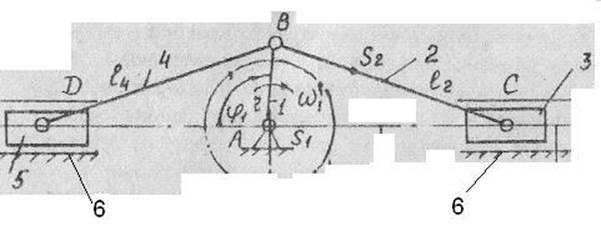
Рис. 3.1
Кинематические пары: А (между 6 и 1) – вращательная низшая 5-ого класса; ВI(1,2), BII(1,4),C(2,3), D(4,5) – вращательные низшие 5-ого класса, CI(3,6), DI(5,6) – поступательные низшие 5-ого класса. Число низших пар 5-ого класса p5=pH=7. Число высших кинематических пар 4-ого класса p4=pB=0.
Так как механизм плоский, то степень подвижности W механизма определяется по формуле П.Л. Чебышева
![]()
W=1 означает, что положение звеньев механизма определяется заданием
одной обобщенной координаты входного звена – угла ![]() .
.
Разложение механизма на структурные группы представлено на рис. 3.2. В составе механизма имеются две структурные группы 2-ого класса (группа (2,3), группа (4,5)) и простейший механизм 1-ого класса (6,1), состоящий из стойки 6 и входного звена 1.
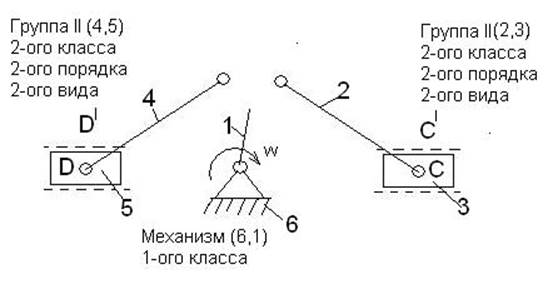
Рис.3.2
![]()
![]() Класс всего механизма – 2-ой. Формула строения
II(2,3) I(1,6) II(4,5).
Класс всего механизма – 2-ой. Формула строения
II(2,3) I(1,6) II(4,5).
3.3. Определение размеров и параметров рычажного механизма
В соответствии с исходными данными (табл. 1.1) входными параметрами синтеза рычажного механизма являются:
- ход поршней 3 и 5 H3=H5=0,16 м;
- частота вращения кривошипа 1 n1=3800 об/мин.
- отношение длин  .
.
Выходными параметрами синтеза,
подлежащим определению, являются размеры звеньев ![]() ,
,
![]() , средняя угловая скорость вращения
кривошипа 1
, средняя угловая скорость вращения
кривошипа 1 ![]()
Основным условием синтеза
данного механизма является обеспечение заданного хода Н3=Н5
поршней. Так как ход Н – это расстояние между крайними положениями поршня, то
показываем два крайних положений механизма AB1C1 и ABICI, когда кривошип АВ и шатун ВС располагаются
по одной прямой (рис. 3.3). Начальная обобщенная координата ![]() , определяющая дальнее крайнее
положение АВ1С1 механизма равна 1800.
, определяющая дальнее крайнее
положение АВ1С1 механизма равна 1800.
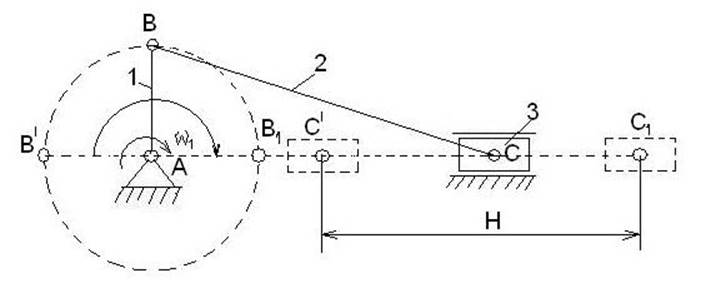
Рис. 3.3
Из рис. 3.3 видно ![]() .
.
Отсюда длина кривошипа  м.
м.
Из отношения ![]() получим длину шатунов:
получим длину шатунов:
![]() м.
м.
Из рис. 3.1 и 3.3 видно, что
механизм центральный, поэтому смещение ![]() оси
ползунов равно 0. Средняя угловая скорость кривошипа 1
оси
ползунов равно 0. Средняя угловая скорость кривошипа 1
 рад/с.
рад/с.
Положение центров масс S звеньев определяем в соответствии с описанием и рис. 1.1
![]() м;
м;
![]() ,
,
![]() ,
, ![]() .
.
Массы звеньев ![]() кг,
кг,
![]() кг,
кг,
![]() ,
,
![]() кг.
кг.
Осевые центральные моменты инерции звеньев
![]()
![]() ,
,
![]()
![]() .
.
Результаты определения размеров и параметров механизма сведены в табл. 3.1
Таблица 3.1
|
|
Размеры, м |
Массы, кг |
Моменты инерции, |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.4. Определение кинематических характеристик рычажного механизма
В качестве кинематических характеристик в 1-ом листе проекта определяются координаты и положение точек и звеньев, их аналоги скоростей. Для определения используется графоаналитический метод планов, выполняемый за цикл работы, т.е. за один оборот кривошипа 1.
3.4.1. Построение планов положений
Выбирается масштабный
коэффициент построения ![]() м/мм.
м/мм.
Чертежные отрезки
![]()
 мм,
мм,
 мм,
мм,
 мм.
мм.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
