|
Введение |
3 |
|
1 Кинематическая схема и исходные данные |
4 |
|
2 Выбор электродвигателя и кинематический расчет |
5 |
|
3 Механические свойства материалов и расчет допустимых напряжений |
8 |
|
4 Расчет передач с определением общих размеров |
11 |
|
5 Предварительный расчет валов |
33 |
|
6 Конструктивные размеры шестерней и колес |
36 |
|
7 Конструктивные размеры корпуса редуктора |
38 |
|
8 Первый этап компоновки |
39 |
|
9 Проверка долговечности подшипников |
41 |
10 Второй этап компоновки |
61 |
|
11 Подбор и проверочный расчет шпонок |
63 |
|
12 Уточненный расчет валов |
67 |
|
13 Вычерчивание редуктора 14 Выбор посадок зубчатых колес, подшипников, крышек, муфт и других деталей |
62 71 |
15 Выбор сорта масла и определение системы смазывания 72 зацеплений и подшипников
16 Сборка редуктора 73
Литература 74
Редуктор – это механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины.
Назначение редуктора – понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим.
Редуктор состоит из корпуса (литого чугунного или сварного стального), в котором помещают элементы передачи – зубчатые колеса, валы, подшипники и т. д.
Редукторы классифицируют по следующим основным признакам: типу передачи (зубчатые, червячные или зубчато-червячные); числу ступеней (одноступенчатые, двухступенчатые и т. д.); типу зубчатых колес (цилиндрические, конические, коническо-цилиндрические и т. д.); относительному расположению валов редуктора в пространстве (горизонтальные, вертикальные); особенностям кинематической схемы (развернутая, соосная, с раздвоенной ступенью и т. д.).
К конструктивной особиности редуктора относится конструкция корпуса, состоящая из трех частей, две из которых по вертикальной плоскости соединены болтами, а к ним присоединена нижняя часть.
Каждая часть корпуса относительно другой фиксируется цилиндрическими или коническими штифтами, что обеспечивает точность и неизменяемость расточки отверстий под подшипники, и сохранность их осей при разборке редуктора. Одна вертикальная часть корпуса имеет фланец с отверстиями под болты для крепления к механизму.
Технологически выполнить корпус из трех частей сложнее, но в этом случае достигается более надежная масло проницаемость, так как горизонтальная плоскость разъема корпуса находится выше уровня масла в картере редуктора.
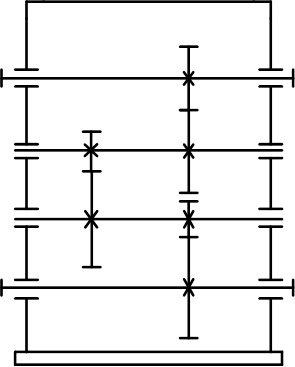
Рисунок 1.1 – Кинематическая схема редуктора
1.2 Исходные данные
Вращающий момент на тихоходном валу ТТ = 600 Н × м
Частота вращения входного вала п1 = 1000 об/мин
Передаточные числа зацепленний принимаем в соответствии
([1], табл. 2 с.142):
номинальное-50;
для первого зацепления-4,455;
для второго зацепления-3,33;
для третьего зацепления-3,33;
фактическое-49,49.
2.1.1 Определяем суммарный коэффициент полезного действия редуктора:
![]() (2.1)
(2.1)
где h1 – коэффициент полезного действия зубчатой передачи в закрытом корпусе, h1 = 0,98;
h2 – потери на трение в опорах каждого вала, h2 = 0,99

2.1.2 Вычисляем вращающий момент на входном валу:
 (2.2)
(2.2)
где Т2 – вращающий момент на ведомом валу, Т2 = 600 Н × м;
и – общее передаточное число редуктора, U =49,49
2.1.3 Определяем угловую скорость вращения входного вала:
 (2.3)
(2.3)
где п1 – частота вращения входного вала, п1 = 1000 об/мин
2.1.4 Находим мощность, передаваемую входным валом:
РК=Т1×w1 (2.4)
РК = 12,124 × 104,67 = 1268,9 (Вт) =1,27(кВт)
2.1.5 Определяем потребную мощность электродвигателя
 (2.5)
(2.5)
2.1.6 В таблице
П.1 ([2], с. 390) по требуемой мощности
РТР=1,403 кВт с учетом возможностей привода, выбираем
электродвигатель закрытый, обдуваемый, с синхронной частотой вращения 1000
об/мин 90L6, с
параметрами РДВ = 1,5 кВт и скольжением s = 6,4% (ГОСТ
19523-81)
2.2 Кинематический расчет
2.2.1 Номинальная частота вращения входного вала:
пДВ=п –s (2.6)
где п – частота вращения вала электродвигателя, п = 1000 об/мин;
s – скольжение, s = 6,4%
пДВ = 1000 – 64 = 936 (об/мин)
2.2.2 Номинальная угловая скорость:
 (2.7)
(2.7)
2.2.3 Определяем частоту вращения ведомого вала редуктора:
 (2.8)
(2.8)
Таблица 1.1– Частоты вращения и угловые скорости
валов редуктора
|
Вал А |
п1 = пДВ = 936 об/мин |
w1 = wДВ = 98 рад/с |
|
Вал В |
|
|
|
Вал С |
|
|
|
Вал D |
|
|
2.2.4 Принимаем вращающий момент на тихоходном валу 4:
ТТ=600(Н![]() м)
м)
2.2.5 Определяем вращающий момент на промежуточном валу 3:
 (2.9)
(2.9)
2.2.6 Определяем вращающий момент на промежуточном валу 2:
 (2.10)
(2.10)
2.2.7 Определяем вращающий момент на быстроходном валу:
Тб=12,14(Н![]() м)
м)
3.1 Выбираем марки материалов колес и шестерен:
3.1.1 Для шестерни первой ступени выбираем сталь 45, термическая обработка - улучшение, твердость НВ 230; для колеса выбираем - сталь 45, термическая обработка - улучшение, но твердость на 30 единиц ниже для последующей приработки зацепления ([2], табл. 3.3, с. 34-35, табл. 3.9, с. 44-45).
3.1.2 Для шестерни второй ступени выбираем сталь 40ХН, термическая обработка - улучшение, твердость НВ 280; для колеса выбираем сталь 40ХН, термическая обработка - улучшение, но твердость на 30 единиц меньше для последующей приработки зацепления ([2], табл. 3.3, с. 34-35, табл. 3.9, с. 44-45).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.