Виды нелинейностей.
По назначению:
1. Естественные – присущие данной системе (нежелательные): трение, люфт, насыщение, дискретность сигнала. Вредные, т.к. могут быть неустранимыми.
2. Вводимые – вводятся разработчиком в качестве закона управления: нелинейные корректирующие устройства, релейный переключатель, логические нелинейные блоки управления, системы с переменной структурой и т.д. Служат для придания системе желаемых динамических свойств. Как правило, обеспечивают более эффективное управление.
По природе:
1. Статические (зависят от координат):
а) Непрерывные
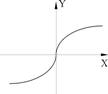
Рисунок 6 – Пример непрерывной функции
б) Релейные

Рисунок 7 – Пример релейной функции
в) Однозначные
г) Многозначные
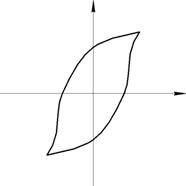
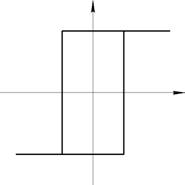
Рисунок 8 – Пример многозначной функции
2. Динамические (зависят от координат и от производных):
Пример:
![]() - вязкое трение
- вязкое трение
 - вязкое трение
(более точная формула)
- вязкое трение
(более точная формула)
 - сухое трение
- сухое трение
Цель: определение вида переходных процессов, анализ устойчивости системы, определение параметров качества, дополнительно (у нелинейных систем), выявление автоколебаний системы, вычисление установившихся ошибок.
Методы: а) Точные:
1) Цифровое моделирование (наиболее распространен для сложных систем)
2) Метод фазового пространства.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.