Допущение о неизменности индуктивного сопротивления цепи намагничивания основано на том, что в системах частотноуправляемого асинхронного электропривода потокосцепление поддерживается на заданном уровне. При этом обеспечивается неизменная степень насыщения магнитной системы, что предопределяет постоянство индуктивности. Постоянство индуктивных сопротивлений рассеяния объясняется тем, что в замкнутых системах элетропривода поддерживается низкое значение скольжения, вследствие чего явление вытеснения тока проявляется слабо.
Математическая модель двигателя строится также в предположении, что напряжения и токи нулевой последовательности отсутствуют, т.е. UА+UВ+UС=0, iA+iB+iC=0.
2.4 Результирующие векторы напряжений, токов и потокосцеплений.
В симметричной машине с идеальными обмотками при питании ее симметричной системой напряжений и угловой частотой w, возникают симметричные системы токов статора и ротора и создаются симметричные системы той же частоты.
 |
 |
Направление оси обмотки фазы А статора принимается за положительное направление вещественной оси в неподвижной системе координат с осями ab.
Так как мгновенные значения ХА, ХВ, ХС представляют собой вещественные числа, то численные значения ХА, ХВ, ХС откладываются на вещественной оси a.
Порядок построения результирующего вектора:
1. На вещественной оси a отложить числовые значения ХА, ХВ, ХС;
2. Вектор ХВ повернуть на угол 2p/3 в положительном направлении;
3. Вектор ХС повернуть на угол 4p/3 в положительном направлении или на -2p/3 в отрицательном направлении;
4. ![]()
![]() Сложить векторы ХА,
аХВ, а2ХС и определить 2/3 этой суммы.
Сложить векторы ХА,
аХВ, а2ХС и определить 2/3 этой суммы.
|
|
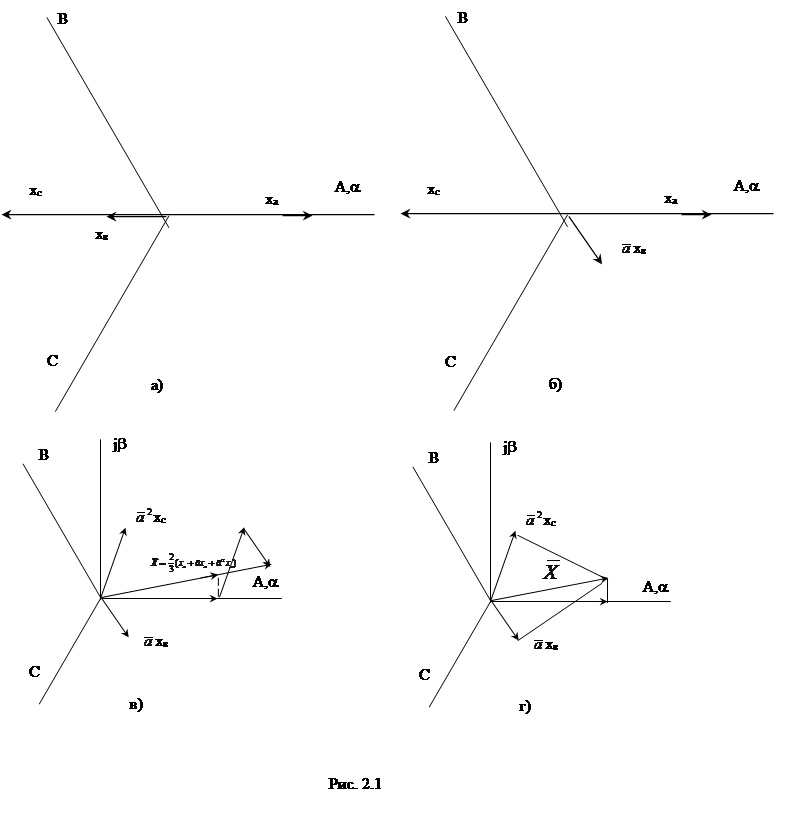 |
Из построения следует, что проекции вектора Х на оси обмоток фаз А, В, С дают как величину, так и знак мгновенных значений ХА, ХВ, ХС.
 |
 |
|||
Таким образом, с помощью формул (2.1) для каждлго момента времени можно определить значения напряжений, токов или потокосцеплений в ортогональной системе координат a,b по значениям соответствующих переменных в системе координат А, В, С, т.е. преобразование 3®2.
При построении систем управления электроприводами возникает необходимость обратного преобразования.
Проекция ХА определяется непосредственно из первого выражения системы (1).
Таким образом, преобразование 2®3 осуществляется с использованием формул:
2.5 Представление результирующего вектора в различных системах координат.
Результирующий вектор Х можно рассматривать не только в неподвижной системе координат a,b, но и в ортогональных системах координат, вращающихся с некоторой скоростью wк (система координат a,b является частным случаем при wк=0). Распространенными являются следующие варианты:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.