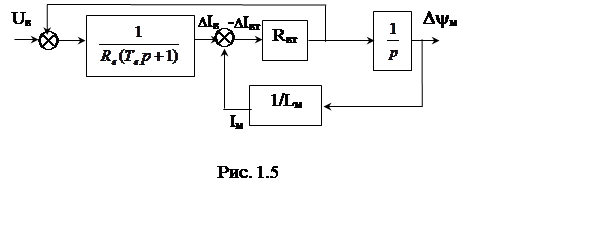
Tвт = Lм/Rвт, Tвм = (Lв+Lм)/Rв
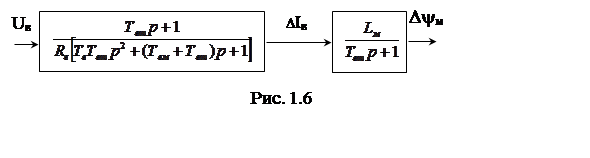
В системах подчиненного регулирования в качестве типовых моделей объектов управления рассматриваются модели первого порядка. Переход от модели второго порядка (рис. 1.6) с передаточной функцией Wв(р)=DIв(р)/DUв(р) к модели первого порядка можно осуществить разными способами.
 |
|||
 |
|||
В первом случае «усечение» передаточной функции Wв(p) путем отбрасывания в знаменателе слагаемого ТвТвтр2. Вносимая при этом погрешность аппроксимации Wв(р) находится в допустимых пределах, если соблюдается равенство:
(1-ТвтТвw2)2+(Твм+Твт)2w2= 1+(Твм+Твт)2w2
или
-2ТвТвтw2+(ТвТвтw2)2=0.
Следовательно, если частота среза интересуемой системы не превышает значения 2/ТвТвт, то рассматриваемое упрощение допустимо.
Второй вариант основан на том, что решение характеристического уравнения
ТвТвтр2+(Твм+Твт)р+1=0
ТвТвтр2+(Твм+Твт)р+1 = (Тв1р+1)(Тв2р+1)
 |
Следует заметить, что параметры линеаризованной модели цепи возбуждения (рис. 1.6) существенным образом зависят от выбора рабочей точки, относительно которой производится линеаризация, и изменяются в широких пределах. Однако, как показано [13], при изменении параметров их соотношения сохраняются такими, что частотные характеристики модели (рис. 1.6) при выборе различных рабочих точек изменяются незначительно, вследствие чего изменениями параметров в большинстве случаев можно пренебречь.
Полученные модели могут быть положены в основу систем регулирования ЭДС генераторов постоянного тока и угловой скорости вращения двигателей с независимым возбуждением. При этом в качестве рабочей точки, относительно которой производится
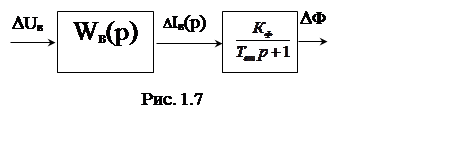
При выполнении практических расчетов более удобно может оказаться применение схемы на рис. 1.6 в несколько видоизмененной форме (рис. 1.7), где Кф=Lм/v. В этом случае коэффициент Кф можно определить непосредственно по кривой намагничивания Ф=Ф(Iв).
 Следует заметить, что для
машин малой и средней мощности, магнитопроводы которых выполняются
шихтованными, можно принять: Твт=0.
Следует заметить, что для
машин малой и средней мощности, магнитопроводы которых выполняются
шихтованными, можно принять: Твт=0.
1.5 Структурная схема двигателя с независимым возбуждением.
В регулируемых электроприводах в качестве регулируемых источников питания якорных цепей двигателей могут быть использованы машинные или полупроводниковые преобразовательные агрегаты. Для случая применения машинных преобразователей, реализуемых как правило, на основе генераторов с независим возбуждением, и реверсивных полупроводниковых преобразователей ток якоря может протекать в любом направлении, зависящем от работы двигателя. Тогда схему замещения якорной цепи можно представить в виде генератора противо-ЭДС (рис. 1.8). здесь Еп – ЭДС преобразовательного агрегата, Rа, Lа – параметры якорной цепи, Е – противо-ЭДС, вырабатываемая якорной цепью двигателя. В составе Rа, Lа учитываются активные сопротивления и индуктивности всех обмоток, включенных в якорную цепь двигателя (компенсационная обмотка, обмотка добавочных полюсов), и сопротивления и индуктивности преобразовательного агрегата.
Предполагается, что параметры Ra, La неизменны (Ra рассчитывается, как правило, для нагретого состояния машин), а влияние реакции якоря на возбуждение двигателя отсутствует.
|
Е = СФw
здесь С – конструктивная постоянная двигателя [5], Ф – магнитный поток, создаваемый обмоткой независимого возбуждения, w - угловая скорость вращения якоря.
Уравнения (1.5) необходимо дополнить выражением, описывающим формирование электромагнитного момента, и уравнением движения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.