Учитывая инвариантность скалярных произведений векторов к системе координат, для вывода выражений, описывающих развиваемый двигателем электромагнитный момент, можно выбрать один конкретный вариант системы координат.
В качестве базового варианта выберем систему координат X,Y, вращающуюся со скоростью вращения магнитного поля. Тогда:
 (2.26)
(2.26)
Подставляя в (2.26) значения напряжений из (2.9), получим следующее выражение:

Здесь слагаемое  представляет собой типовые
потери в обмотках статора, а слагаемое
представляет собой типовые
потери в обмотках статора, а слагаемое  –
мощность энергии. Характеризующей приращение запасаемой в индуктивностях
статора электромагнитной энергии. Следовательно, мощность, передаваемая на вал
электродвигателя (мощность в зазоре, электромагнитная мощность), равна
–
мощность энергии. Характеризующей приращение запасаемой в индуктивностях
статора электромагнитной энергии. Следовательно, мощность, передаваемая на вал
электродвигателя (мощность в зазоре, электромагнитная мощность), равна
 . (2.27)
. (2.27)
Здесь  , где Zр – число пар полюсов, da - пространственный
(геометрический) угол поворота ротора.
, где Zр – число пар полюсов, da - пространственный
(геометрический) угол поворота ротора.
Механическая работа, выполняемая двигателем при повороте ротора на угол da, равна произведению развиваемого двигателем момента М на этот угол, т.е. Wмнх=М×da. Следовательно, электромагнитная мощность описывается выражением:
 (2.28)
(2.28)
Из равенства выражений (2.27) и (2.28) следует, что
 .
(2.29)
.
(2.29)
Полученной выражение можно представить в следующем виде:
 . (2.30)
. (2.30)
Идентичность выражений (2.29) и (2.30) можно проверить непосредственным вычислением.
Учитывая, что ![]() , выражение (2.30) перепишем
следующим образом:
, выражение (2.30) перепишем
следующим образом:
 .
.
Произведение ![]() является вещественным
числом. Следовательно,
является вещественным
числом. Следовательно,
 (2.31)
(2.31)
Заменяя в (2.30) вектор ![]() , выражением
, выражением  находим:
находим:

 .
(2.32)
.
(2.32)
Из (2.22) следует, что:
 .
.
следовательно,

 (2.33)
(2.33)
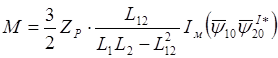
Подставляя в (2.33) выражение
 , получаемое из (2.22), находим:
, получаемое из (2.22), находим:

 (2.34)
(2.34)
Так
как:  , из (2.33) находим:
, из (2.33) находим:
 .
(2.35)
.
(2.35)
Выражения (2.30)-(2.35) представляют все возможные способы представления электромагнитного момента, развиваемого двигателем.
2.10 Структурная схема.
Как следует из уравнений состояния статора и ротора, а так же из уравнений, описывающих формирование потокосцеплений статора и ротора, следует, что асинхронный двигатель имеет внутренние перекрестные связи. Наиболее простая структурная схема двигателя, имеющая наименьшее количество перекрестных связей, получается при использовании базовой системы векторов y1, y2.
Рассматривая уравнения машины в неподвижной системе координат a,b из (2.17) и (2.18) находим:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Следовательно уравнения (2.6) и (2.13) можно преобразовать к виду:
 ,
,
 ,
,
 ,
,
 .
.
![]() Следовательно, динамические
свойства асинхронного двигателя в осях a,b описываются уравнениями:
Следовательно, динамические
свойства асинхронного двигателя в осях a,b описываются уравнениями:

 ,
,

 ,
,

 , (2.36)
, (2.36)

 ,
,
 ,
,
 .
.
Уравнениям (2.36) соответствует структурная схема электромеханического преобразования энергии в асинхронном двигателе, представленная на рис. 2.4.
Распространенным вариантом построения систем управления частотно-управляемым электроприводом является использование принципа какого-либо из результирующих векторов по вещественной оси системы координат.
Для случая ориентации
вектора потокосцепления ротора по оси a имеем: y2b=0,  , y2a=|y2|. Тогда система уравнений
(2.36) упрощается:
, y2a=|y2|. Тогда система уравнений
(2.36) упрощается:
![]()

 ,
,

 ,
,

 ,
(2.37)
,
(2.37)
 ,
,
 ,
,
 .
.
Объединив второе и четвертое уравнения системы (2.37), можно получить структурную схему двигателя в этом частном случае (рис. 2.5).
При записи уравнений двигателя в осях X,Y получим систему уравнений:
![]()





 (2.38)
(2.38)



Соответствующая структурная схема приведена на рис. 2.6.
При ориентировании системы управления по потокосцеплеию ротора таким образом, чтобы обеспечивались условия y2y=0, y2х=const, убедимся, что в установившихся режима двигателей описывается уравнениями:
![]()
![]()
![]() (2.39)
(2.39)
![]()
![]()
При отсутствии питания со стороны ротора U2х=U2y=0. Тогда i’2x=0 и из второго и четвертого уравнений системы (2.21) находим:
![]()
 ,
,
![]()
Следовательно,
Полученное выражение показывает, что при совмещении вещественной оси х вращающейся координатной системы с вектором потоксцепления ротора управление моментом асинхронного двигателя подобно управлению моментом двигателя постоянного тока с независимым возбуждением.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.