При полной I1R1 – компенсации, т.е. при
создании положительной обратной связи по полному току ![]() , обеспечивается
регулирование с поддержанием постоянства потокосцепления статора: y1=const. При использовании
упрощенных вариантов реализации обратной связи по току статора обеспечивается
приближенная реализация условия y1=const.
, обеспечивается
регулирование с поддержанием постоянства потокосцепления статора: y1=const. При использовании
упрощенных вариантов реализации обратной связи по току статора обеспечивается
приближенная реализация условия y1=const.
![]()
Возможно введение компенсации падения напряжения на полном сопротивлении обмоток статора Z1=R1+jax1 (I1Z1 - компенсация). Такое управление называется векторным частотным управлением [8]. Управление с I1Z1 – компенсацией обеспечивает поддержание потокосцепления в воздушном зазоре: yм=aХмIм=const.
При регулировании скорости выше основной (двухзонное регулирование, w1>w1н) напряжение на статоре поддерживается на постоянном уровне: U1=U1н=const. При этом с ростом частоты снижается ток намагничивания, что приводит к уменьшению критического момента (рис. 2.10).
2.13 Частотно-токовое управление.
Для регулирования скорости двигателя в качестве управления можно использовать не частоту и напряжение, а частоту и ток статора. Управление с заданием токов статора и частоты называют частотно-токовым.
При частотно-токовом управлении или используются преобразователи частоты на основе инверторов тока, или преобразователи на основе инверторов напряжения и преобразователи с непосредственной связью за счет охвата глубокими отрицательными связями по токам статора переводятся в режим работы в качестве источников тока.
Различают системы частотно-токового управления с косвенной или прямой ориентацией системы координат по какому-либо из результирующих векторов. Классической системой управления с прямой ориентацией является система Transvektor, разработанная в фирме Siemens. Наиболее простыми получаются системы с косвенной ориентацией по потокосцеплению ротора, рассмотрением которых и ограничимся.
Уравнение (2.43) с учетом введенных в п.2.12 обозначений можно записать в следующем виде:
 .
.
Следовательно:
 ,
,
 . (2.49)
. (2.49)
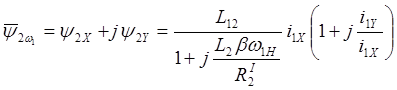
В неподвижной системе координат имеем:
 .
(2.50)
.
(2.50)
Если обеспечить регулирование при выполнении условия
 , (2.51)
, (2.51)
то ![]() и
реализуется регулирование с косвенной ориентацией системы координат a,b по вектору потокосцепления
ротора. При этом в соответствии с (2.35)
и
реализуется регулирование с косвенной ориентацией системы координат a,b по вектору потокосцепления
ротора. При этом в соответствии с (2.35)

И управление асинхронным двигателем становится аналогичным управлению двигателем постоянного тока с независимым возбуждением.
В системе регулирования составляющая i1a статорного тока является одним из сигналов задания, а ток i1b соответствует сигналу на выходе регулятора скорости. Тогда, формируя на основе (2.5) абсолютное скольжение по закону:
 , (2.52)
, (2.52)
Обеспечиваем управление с ориентацией системы координат по вектору потокосцепления ротора и формирование задания по частоте в соответствии с выражением:
 .
(2.53)
.
(2.53)
Во вращающейся системе координат X,Y
 (2.54)
(2.54)
И требуется регулирование при выполнении условий
 ,
,
 . (2.55)
. (2.55)
Используя принцип косвенной ориентации по вектору y2, можно создавать системы двухзонного регулирования (w1<w1н) токи i1a, i1х следует задавать из условия создания номинального потокосцепления y2. Преход во вторую зону регулирования (w1>w1н) обеспечивается снижением токов i1a, i1х.
При точном выполнении условий (2.52), (2.55) контуры регулирования токов являются безынерционными. Неточное соблюдение указанных условий и неточное измерение угловой скорости вращения ротора в системе возникают медленно затухающие колебания потокосцепления ротора и электромагнитного момента [8]. Для устранения этих колебаний в систему вводят дополнительные корректирующие устройства или адаптивные оценщики параметров двигателя.
Чувствительность систем частотно-токового управления к неточному заданию параметров двигателя и связанному с этим неточному определению требуемого значения абсолютного скольжения проанализирована в [8].
3. Синхронные двигатели.
3.1 преобразование энергии в синхронных двигателях.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.