|
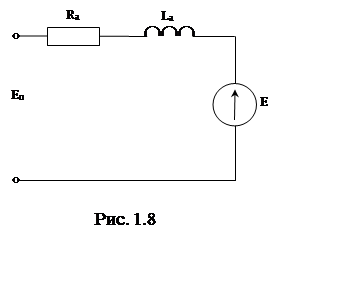
здесь Мс – приведенный к валу двигателя момент сопротивления, J – приведенный момент инерции.
Момент сопротивления может содержать составляющие, сложным образом зависящие от скорости вращения или угла поворота вала двигателя. Каждая из составляющих и момент Мс в целом содержат и активные и реактивные компоненты. Реальный состав Мс определяется при рассмотрении конкретных процессов, для управления которыми используется двигатель. Точный учет влияния момента сопротивления реактивного характера рассмотрен в [13].
 |
|||
 |
|||
 |
|||
 |
|||
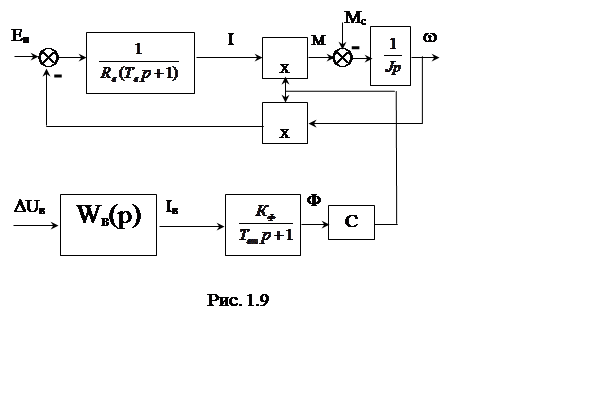
В общем случае систему уравнений (1.5), (1.6) необходимо дополнить уравнениями, описывающими формирование магнитного потока. Тогда полную структурную схему двигателя можно представить в виде рис. 1.9. Здесь, с учетом изложенного в п.1.4, опущены знаки отклонений для координат цепи возбуждения.
Полученная структурная схема характеризуется перемножением координат и является нелинейной. В некоторых вариантах электроприводов, (например, при одновременном изменении входных сигналов Еп и Uв) полезной может оказаться линеаризованная модель структурной схемы. Линеаризация заключается в разложении нелинейных зависимостей в ряд Тейлора по степеням малых отклонений координат, входящих в произведения, и отбрасывании в этих разложениях нелинейных членов, представляющих собой члены высшего порядка малости.
Если для некоторого установившегося режима электромагнитный момент и ЭДС двигателя равны соответственно
М0 = СФ0I0, Е0 = СФ0w0, (1.7)
то при отклонении потока, тока, и угловой скорости вращения соответственно на малые величины DФ, DI, Dw, то новые значения момента и ЭДС можно определить следующим образом:
М0+DМ=С(Ф0+DФ)(I0+DI),
Е0+DЕ=С(Ф0+DФ)(w0+Dw). (1.8)
DМ = С(Ф0+DФ)(I0+DI)-СФ0I = СФ0DI+СI0DФ+СDФDI
DЕ = СФ0Dw+Сw0DФ+СDФDw (1.9)
Отбрасывая слагаемые второго порядка малости, получим:
DМ = СФ0DI+СI0DФ
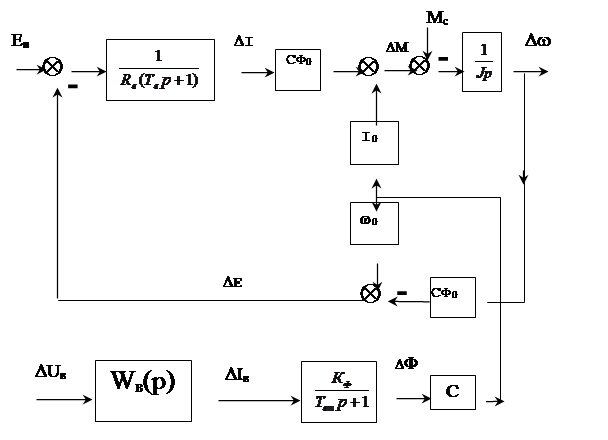
DЕ = СФ0Dw+Сw0DФ (1.10)
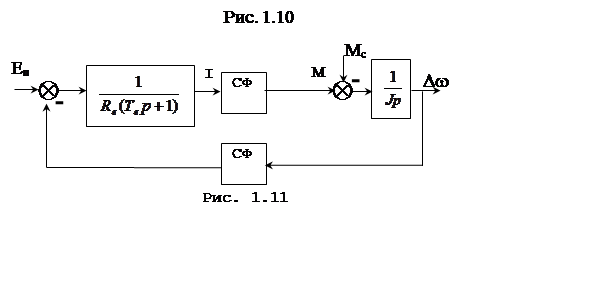
Следовательно, линеаризованную модель двигателя можно представить в виде схемы, приведенной на рис. 1.10.
При неизменном потоке возбуждения структурная схема двигателя упрощается (рис. 1.11)
1.6 Структурная схема двигателя с последовательным возбуждением.
![]()
 |
М = Сфi (1.11)
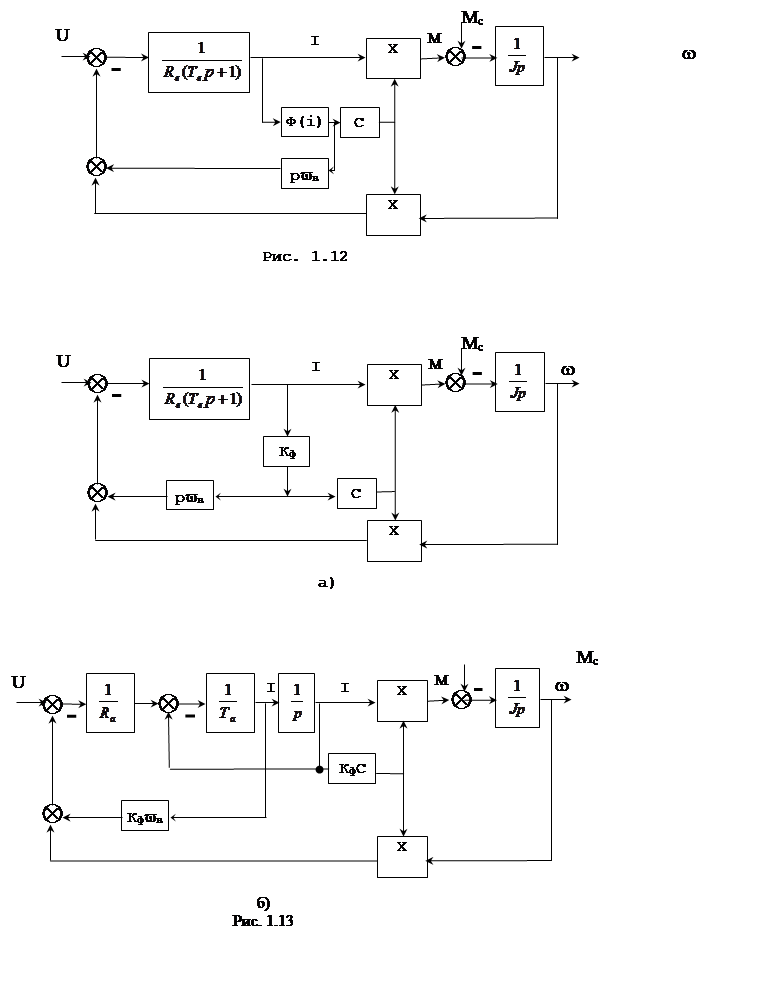
Система уравнений (1.11) соответствует структурная схема, приведенная на рис. 1.12.
После замены кривой намагничивания линейной зависимостью Ф=kфi получаем упрощенную схему, показанную на рис. 1.13.а. при моделировании более приемлемой может оказаться схема, приведенная на рис. 1.13.б.
Узлы вычисления момента и ЭДС можно линеаризовать аналогично линеаризации соответствующих узлов двигателя с независимым возбуждением согласно выражению (1.10).
 |
1.7 Структурная схема двигателя со смешанным возбуждением.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.