}
q[j] = p[i];
q[j + 1] = t;
delete []p;
p = new Pnt [j + 2]; n = j + 2;
for(i = 0; i < n; i++)
p[i] = q[i];
delete []q;
}
CPolygon(double *x, double *y, int m, TColor cl);
};
CPolygon::CPolygon(double *x, double *y, int m, TColor cl):SPolygon(cl)
{
// выпуклая оболочка методом Дейкстры
int i; Pnt t; p = new Pnt [3]; n = 3;
for(i = 0; i < 3; i++)
{
p[i].x = x[i]; p[i].y = y[i];
}
if((p[1] - p[0]) * (p[2] - p[1]) < 0)
{
t = p[1]; p[1] = p[2]; p[2] = t;
}
for(i = 3; i < m; i++)
{
t.x = x[i]; t.y = y[i];
Insert(t);
}
}
//--------------------------------------------------------------------------__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
double rad = 150; //радиус окружности и вершины семиугольника
int i, mm = 7;
double *x, *y;
x = new double [2 * mm]; y = new double [2 * mm];
for(i = 0; i < mm; i++)
{
// вершины большого семиугольника
x[i] = rad * cos(2 * PI * i / mm);
y[i] = rad * sin(2 * PI * i / mm);
// вершины маленького семиугольника
x[i + mm] = rad * cos(2 * PI * i / mm + PI / mm) / 2;
y[i + mm] = rad * sin(2 * PI * i / mm + PI / mm) / 2;
}
randomize();
for(i = 0; i < 2 * mm; i++)
x[i] += random(100) - 50;
CPolygon dom2(x, y, 2 * mm, (TColor)RGB(0,200,200)); // построение выпуклой
// оболочки
SPolygon dom3(x, y, 2 * mm, (TColor)RGB(255,0,255));// построение звездчатого
// полигона
dom2.show(-300, -300, 300, 300); // вывод выпуклой оболочки
dom3.show(-300, -300, 300, 300); // вывод звездчатого полигона
}
//--------------------------------------------------------------------------В результате работы программы на экран будут выведены выпуклая оболочка 14 точек и звездчатый многоугольник, содержащий эти точки. На рис. 6.7 показаны примеры результатов вывода.
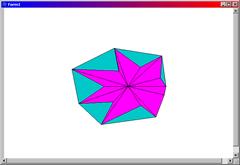
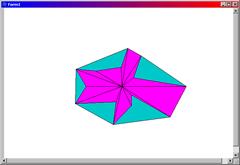
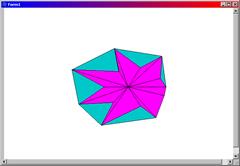
Рис. 6.7. Звездчатые многоугольники и их выпуклые оболочки
Выпуклая оболочка в трехмерном пространстве. Отметим, что рассмотренный выше алгоритм был предложен Дейкстрой для построения выпуклой оболочки в трехмерном пространстве. Он основан на приведенной ниже идее добавления точек к выпуклому многограннику.
Пусть многогранник P задан списком составляющих его граней. Построим список граней многогранника P', который будет выпуклой оболочкой вершин многогранника P и новой точки q, не принадлежащей P. Грани задаются как массив вершин соответствующих многоугольников. Грань называется видимой из точки q, если угол между ее вектором внешней нормали и вектором, соединяющим любую точку этой грани (рис. 6.8) с точкой q, меньше π / 2. В противном случае будем называть грань невидимой. Каждое ребро принадлежит некоторым двум граням. Мы будем допускать случаи, при которых две грани находятся в одной плоскости. Ребро, принадлежащее видимой грани и невидимой грани, называется контурным. Если соединить точку q с вершинами контурного ребра, то получится треугольник, который будет гранью многогранника P'. Следовательно, чтобы получить список граней многогранника P', нужно сначала удалить все видимые грани. Затем добавить к оставшемуся списку граней все треугольники, полученные соединением точки q с вершинами контурных ребер.
 |
 |
Рис. 6.9. Тетраэдр p0p1p2p3
Это равенство можно рассматривать как систему линейных уравнений с ненулевым определителем. Решая эту систему, сведем задачу к случаям расположения точки относительно тетраэдра, заданного системой неравенств: x ≥ 0, y ≥ 0, z ≥ 0, x + y + z ≤ 1 (рис. 6.9). Обозначим решение системы через (x, y, z). Возможны перечисленные ниже пятнадцать случаев, каждому из которых соответствует список граней выпуклой оболочки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.