





















Содержание
Введение. 2
1.Анализ кривошипно – ползунного механизма. 3
1.1. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА.. 4
1.2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.. 5
1.2.1. Построение планов положений механизма. 5
1.2.2 Определение скоростей точек звеньев механизма с помощью планов скоростей. 6
1.2.3. Построение графика изменения силы полезного сопротивления. 8
1.2.4. Определение ускорений точек звеньев механизма с помощью планов ускорений. 10
1.2.5. Построение кинематических диаграмм.. 13
1.3. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.. 16
1.3.1. Определение мощности полезного сопротивления ползуна. 16
1.3.2. Определение инерционных нагрузок. 16
1.3.3. Определение реакций в кинематических парах. 18
1.3.4. Построение графика приведенных моментов сил сопротивления. 20
1.3.5. Определение мощности на валу кривошипа. 22
Заключение. 23
Список используемой литературы.. 24
Теория Машин и механизмов как наука изучает наиболее общие вопросы исследования и проектирования механизмов и машин. Она делится на 4-е раздела.
1. Структурный анализ – изучение строения механизмов, определение положения механизмов и траекторий, описываемых отдельными точками, определение скоростей и ускорений отдельных точек и звеньев механизма.
2. Динамический анализ механизма – определение различных сил действующих на звенья механизма, изучение энергетического баланса машин (кпд и т.д.), изучение истинного запаса движения машин под действием заданных сил.
3. Синтез механизмов – исследование и проектирование различных механизмов.
4. Основы теории машин – автоматов (изучение способов регулирования скорости хода машин, изучение способа уравновешивания сил инерции в машине).
Курсовой проект по прикладной механике включает анализ исполнительного механизма (ИМ) технологической машины и проектирования по результатам анализа силового привода, состоящего из редуктора и открытой механической передачи.
В настоящей работе рассматривается первый раздел курсового проекта – выполнение структурного, кинематического и динамического анализов кривошипно-ползунного механизма и шарнирного четырёхзвенника, применяемых в технологических машинах. Все графические построения по этому разделу проекта выполняются на одном листе чертёжной бумаги формата А1,в карандаше, описательная часть проекта оформляется в виде пояснительной записки, примерно, как в данной работе.
Рассматриваемый раздел включает следующие этапы:
1) Выполнение структурного анализа механизма.
2) Построение планов положений механизма для 12-ти равноотстоящих положений ведущего звена, траектории движения точек звеньев.
3) Построение планов скоростей точек звеньев механизма, соответствующих построенным положениям.
4) Построение планов ускорений точек для положения механизма, при котором мощность, развеваемая звеном, к которому приложена сила сопротивления, принимает максимальное значение.
5)
Определение
инерционных нагрузок звеньев в рассматриваемом положении механизма. При этом
центры масс звеньев располагаются в геометрическом центре звеньев, центр масс
ползуна ![]() совпадает с центром шарнира С, массы
звеньев определяются по формуле
совпадает с центром шарнира С, массы
звеньев определяются по формуле ![]() ,где
,где  ;
; ![]() -длина
звена,
-длина
звена,![]() ; масса ползуна принимается в 2-4 раза
больше кривошипа; момент инерции звеньев-стержней относительно оси, проходящий
через их центр масс перпендикулярно плоскости, определяется по формуле
; масса ползуна принимается в 2-4 раза
больше кривошипа; момент инерции звеньев-стержней относительно оси, проходящий
через их центр масс перпендикулярно плоскости, определяется по формуле где
где ![]() -масса
звена, кг;
-масса
звена, кг; ![]() -длина, м.
-длина, м.
6) Определение реакций в кинематических парах (без учёта сил трения ).
7)
Определение
уравновешивающей силы, которую следует считать приложенной в точке ![]() перпендикулярно кривошипу.
перпендикулярно кривошипу.
8) Построение графика изменения приведённого к кривошипу момента сил сопротивления в зависимости от угла поворота кривошипа за один цикл его движения (с помощью метода Жуковского, причём учитывается только сила полезного сопротивления).
9) Построение графика изменения работы сил сопротивления и движущих сил в зависимости от угла поворота кривошипа.
10) Построение графика моментов движущих сил в функции угла поворота кривошипа и определение мощности на валу кривошипа. Полученная мощность является одним из исходных, наряду с угловой скоростью кривошипа I, схема привода, для выполнения второго раздела проекта – проектирование силового привода.
Исходные данные курсовой работы
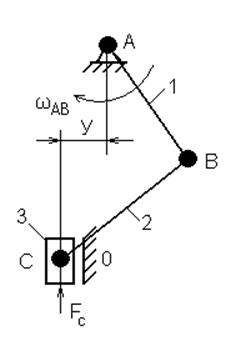
0 – стойка механизма; 1 – кривошип; 2 – шатун; 3 – ползун.
Рис. 1 Схема исполнительного механизма
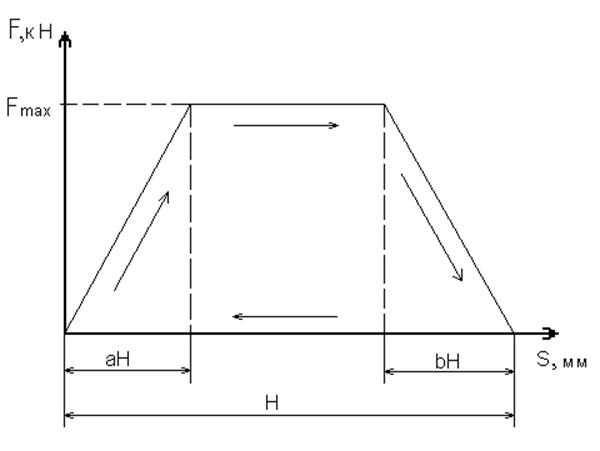
Рис. 2 График силы полезного сопротивления.
Исходные данные:
Задачами структурного анализа механизма в курсовом проекте являются; установление подвижности кинематических пар, определение степени подвижности механизма, выделение групп Асура и написание формулы строения механизма.
Степень подвижности механизма определяется по формуле Чебышева
![]()
![]() (1)
(1)
где ![]() - число подвижных звеньев;
- число подвижных звеньев;
![]() -
количество одноподвижных кинематических пар пятого класса;
-
количество одноподвижных кинематических пар пятого класса;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.