![]() -
количество двухподвижных кинематических пар четвертого класса.
-
количество двухподвижных кинематических пар четвертого класса.
Рассматриваемый механизм
состоит из трёх подвижных звеньев, т.е. n = 3, содержит четыре кинематические пары пятого класса,![]() , из которых одна является поступательной
, из которых одна является поступательной ![]() -соединяет ползун 3 со стойкой 0, и три –
вращательные, В01, - соединяет шарниром кривошип 1 со стойкой 0;
пара В12 – соединяет шарниром кривошип 1 с шатуном 2; пара В23
– соединяет шарниром шатун 2 с ползуном 3.
-соединяет ползун 3 со стойкой 0, и три –
вращательные, В01, - соединяет шарниром кривошип 1 со стойкой 0;
пара В12 – соединяет шарниром кривошип 1 с шатуном 2; пара В23
– соединяет шарниром шатун 2 с ползуном 3.
Кинематических пар
четвёртого класса в механизме нет, ![]() .
.
Степень подвижности механизма
![]()
Механизм состоит из начального механизма, содержащего кривошип 1, стойку 0 и одну вращательную кинематическую пару В01 (рис.3) и одной группы Асура, содержащей шатун 2, ползун 3 и три кинематические пары (рис. 4), вращательные В12 и В20 и поступательную П30.
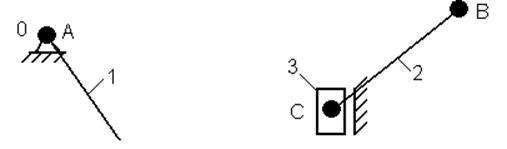
Рис. 3 Начальный механизм Рис. 4 Группа Ассура
Формула строения
механизма это последовательность присоединения к начальному механизму звеньев
механизма ![]() .
.
Из структурного анализа
механизма, что для получения вполне определенных движений звеньев, достаточно
первоначально задать одному из звеньев определённое движение. Это и
подтверждается принципом образования механизмов по Асуру. В нашем механизме
задано вращательное движение с постоянной угловой скоростью шатуну ![]() .
.
Задачами кинематического анализа являются: определение траекторий движения точек звеньев, линейных скоростей и ускорений точек звеньев, угловых скоростей и ускорений звеньев. Эти задачи решаются путём построения планов положений механизма, скоростей и ускорений точек звеньев механизма и путём построения кинематических диаграмм.
Для построения планов положений механизма необходимо выбрать масштаб длины.
 (2)
(2)
где АВ – отрезок прямой, изображающий кривошип на чертеже.
Принимаем произвольно длину кривошипа на чертеже АВ = 60 мм, тогда
 .
.
Определяем масштабную
длину ВС, изображающую длину шатуна ![]() .
.
 .
.
Определяем масштабную длину смещения у.
По принятой величине АВ и полученной ВС строем схему механизма в 12-ти положениях.
Изображаем известные
траектории движения точек звеньев механизма. В нашем механизме известна
траектория движения точки В кривошипа, это окружность с радиусом равным длине
кривошипа , и прямолинейная траектория вдоль направляющей ползуна x-x. Из точки А проводим окружность радиусом АВ и делим её на 12
равных частей. Деление начинаем с положения, когда ползун находится крайней нижней
точке, при этом кривошип и шатун вытягиваются в одну линию. Из точки А радиусом
АВ+ВС проводим дугу, пересекая прямую x-x получим точку С0. деление
окружности на 12 частей проводим от крайней нижней точки В0 по
направлению вращения кривошипа. Из полученных точек ![]() радиусом
ВС проводим дуги на пересечении прямой x-x, получим точки
радиусом
ВС проводим дуги на пересечении прямой x-x, получим точки ![]() Второе крайнее положение ползуна
определяем дугой радиуса (ВС-АВ) на направляющей x-x, обозначаем
точку
Второе крайнее положение ползуна
определяем дугой радиуса (ВС-АВ) на направляющей x-x, обозначаем
точку ![]() , номер точки – ближайший предыдущий номер.
, номер точки – ближайший предыдущий номер.
![]() соединим с точкой А до пересечения с
окружностью, получим точку
соединим с точкой А до пересечения с
окружностью, получим точку ![]() . Соединяем прямыми
линиями точки
. Соединяем прямыми
линиями точки ![]() с соответствующими точками
с соответствующими точками ![]() и далее с точкой А. Во всех положениях
шатуна АВ определим его середину и обозначим точки
и далее с точкой А. Во всех положениях
шатуна АВ определим его середину и обозначим точки ![]() ,
соединим эти точки плавной кривой, что дает траекторию движения центра масс
ползуна.
,
соединим эти точки плавной кривой, что дает траекторию движения центра масс
ползуна.
Таким образом, из построенных 12 планов положений механизма видно, что траектории движения точек: В-окружность радиусом АВ: С – прямо по Х-Х: S (центр масс шатуна) - шатунная кривая. Ход ползуна
![]() ;
;
где ![]() -
расстояние между крайними точками расположения ползуна на плане положения
механизма,
-
расстояние между крайними точками расположения ползуна на плане положения
механизма, ![]()
![]()
Определяем скорость точки
В, совершающей равномерное вращательное движение ![]()
![]() (3)
(3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.