·
жесткость
пружины ![]() , Н/м
, Н/м
·
начальное
усилие поджатия ![]()
5. Графы таблица 2.1 результатов дополняются расчетом для каждого значения угла возвышения φi текущие значения
· усилие пружины (см. 3.1) ,( Н);
· момент пружинного уравновешивающего механизма
![]() , (Н м)
;
, (Н м)
;
·
момента
неуравновешенности ![]() .
.
Форма и результаты расчета в Excel проектируемого пружинного уравновешивающего механизма по данным рассматриваемого примера представлены на рис. 3.2.
По результатам расчетов для визуального сравнения строятся графики: усилий желаемого и пружины уравновешивающего механизма (рис.3.3), моментов уравновешивающего и качающейся части (рис.3.4). Для построения графиков в Excel используется команда «Вставка – Диаграммы – Точечная» с выбором соответствующих параметров.
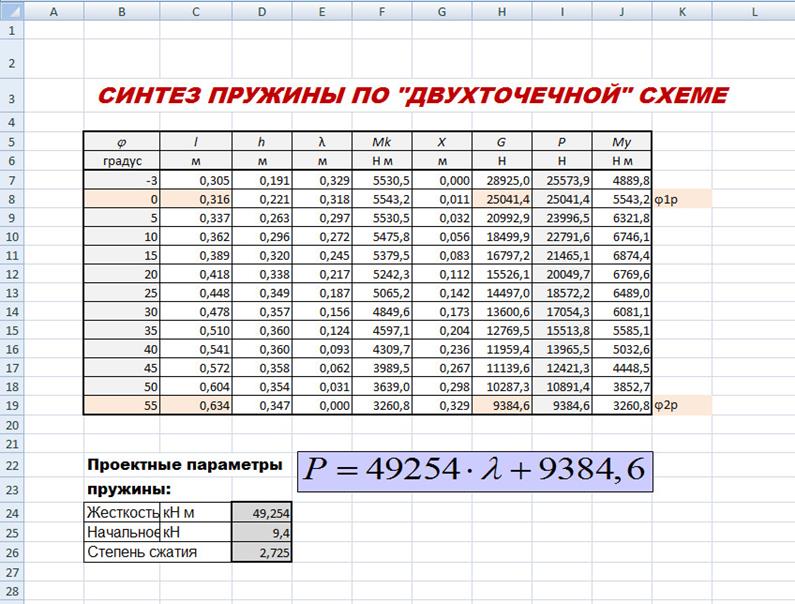
Рисунок 3.2 Лист синтеза пружинного аккумулятора в Excel к рассматриваемому примеру
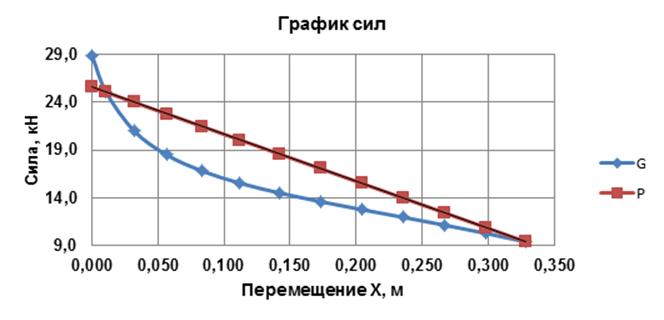
Рисунок 3.3 Графики желаемого усилия и силы пружинного аккумулятора по схеме «двух точек»
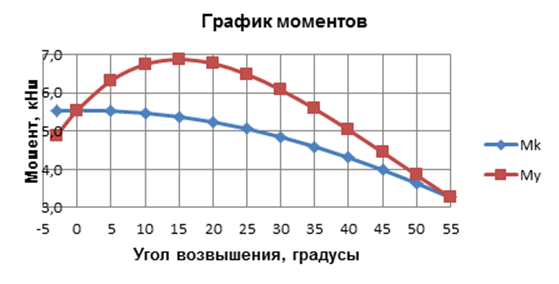
Рисунок 3.4 Графики момента качающейся части (Мк) и проекта пружинного механизма (Му) по схеме «двух точек»
Определение оптимальных значений параметров пружинного аккумулятора может быть выполнено путем линеаризации желаемого усилия G методом наименьших квадратов (МНК) – разновидности методов взвешенных невязок.
Так как зависимость усилия пружины (P) от стрелы прогиба (λ) представляется уравнением, близким к линейному (3.1), наилучшее приближение этой зависимости к желаемому усилию G выполняется минимизацией квадрата ошибки ei=(Pi-Gi):
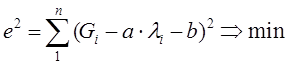 , где
a= Cpr;
b=Pm.
, где
a= Cpr;
b=Pm.
Для минимизации этой функции коэффициенты a и b линейной зависимости должны удовлетворять условиям:
 .
.
Коэффициенты a и b можно вычислить по формулам МНК, используя данные столбцов λi и Gi (табл. 2.1).
В Excel эту задачу можно решить без программирования с помощью:
v встроенной функции = ЛИНЕЙН(известные_y, [известные_x], [константа], [статистика]), которая с применением МНК рассчитывает параметры прямой линии, наилучшим образом аппроксимирующей имеющиеся данные;
v процедуры РЕГРЕССИЯ из пакета «Анализ данных»;
v по графику G=G(λ) путем вставки Линия тренда – Линейная.
Наиболее экономично параметры пружины (жесткость и начальное усилие поджатия пружины) УМ определяются последним способом по графику желаемого усилия G=G(λ). При этом рекомендуется следующий алгоритм:
1. путем вызова ВСТАВКА – ДИАГРАММА – ТОЧЕЧНАЯ по данные столбцов λi и Gi (табл. 2.1) строится график желаемого усилия G=G(λ);
2. выделив график полученной функции, вызвать процедуру Добавить линию тренда;
3. в окне «Формат линии тренда» (рис. 3.5) установить параметр «Линейная» и флажки «Показывать уравнение на диаграмме» и «Поместить на диаграмму величину достоверности аппроксимации (R^2)».
Уравнение на диаграмме представляет собой оптимизированное уравнение пружины. Качество аппроксимации определяется по коэффициенту детерминации (R^2). В зависимости от степени корреляции линии тренда с аппроксимируемыми данными значения R^2 изменяются от 0 (при отсутствии связи) до 1 (при полном совпадении результатов).
Вид графика подбора пружины для данных рассматриваемого примера представлен на рис. 3.6. Результаты расчета примера с параметрами подобранной пружины представлены на фрагменте листа Excel (рис. 3.7).
Поскольку применение данного метода в практике параметрического синтеза пружинных уравновешивающих механизмов ранее не известно, представляет интерес его сравнение с результатами, полученными по «двум точкам» (рис.3.8, 3.9).
Сравнительный анализ двух схем синтеза пружины уравновешивающего механизма показывает, что степень соответствия желаемого усилия и силы пружины, определенной по МНК, значительно выше, чем по схеме «двух точек». Качественно это отражено на графиках (рис.3.8, 3.9), количественно - коэффициентом детерминации (соответственно R^2= 0,842 против R^2= 0,704).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.