Таблица 2.1 - Предварительный расчет параметров уравновешивания
|
φi |
αi=α0+ φi |
βi=β0+ φi |
li |
λi |
hi |
Mki |
Gi |
|
градус |
радиан |
радиан |
м |
м |
м |
Н •м |
Н |
|
Формула |
(2.1) |
(2.3) |
(2.2) |
(1.1) |
(2.4) |
||
|
φmin |
α1 |
β1 |
l1 |
λ1 |
h1 |
Mk1 |
G1 |
|
. φi . . |
. αi . . |
. βi . . |
. li . . |
. λi . . |
. hi . . |
. Mki . . |
. Gi . . |
|
φmax |
αm |
βm |
lm |
λm=0 |
hm |
Mkm |
Gm |
Последовательно по правилам Excel в расчетных ячейках программируются представленные ниже формулы и выполняются вычисления параметров по столбцам таблицы.
(Следует иметь ввиду, что тригонометрические функции в Excel вычисляются для аргументов, заданных в радианной мере).
При вычислениях (табл. 2.1) используются следующие выражения:
· момент веса качающейся части (1.1)
![]() [Н •м], где
[Н •м], где
![]() - постоянная составляющая момента;
- постоянная составляющая момента;
· расстояние между неподвижным и подвижным шарнирами УМ, т. е. текущее значение АВ
![]() [м], (2.1)
[м], (2.1)
·
плечо
действия силы УМ относительно оси цапф ![]()
 [м], (2.2)
[м], (2.2)
· ход подвижного шарнира А относительно положения при φmax
![]() [м], (2.3)
[м], (2.3)
где значение ![]() выбирается из рассчитанных по формуле (2.1)
значений li;
выбирается из рассчитанных по формуле (2.1)
значений li;
· желаемое усилие аккумулятора уравновешивающего механизма в зоне подвижного шарнира А
 ,
Н. (2.4)
,
Н. (2.4)
Форма и результаты расчета исходных геометрических и силовых параметров проектируемого уравновешивающего механизма по данным рассматриваемого примера представлены на рис. 2.1.
Графики зависимостей исходных силовых параметров в зависимости от углов возвышения и перемещения подвижного шарнира относительно неподвижного представлены на рис. 2.2 – 2.4. Графики построены по результатам расчетов с помощью встроенных графических средств Excel: «Вставка – Диаграмма – Точечная».
Очевидно (рис. 2.3, 2.4.), что зависимости желаемого усилия от угла возвышения и линейного перемещения подвижного шарнира имеют одинаковый, но взаимообратный, характер.
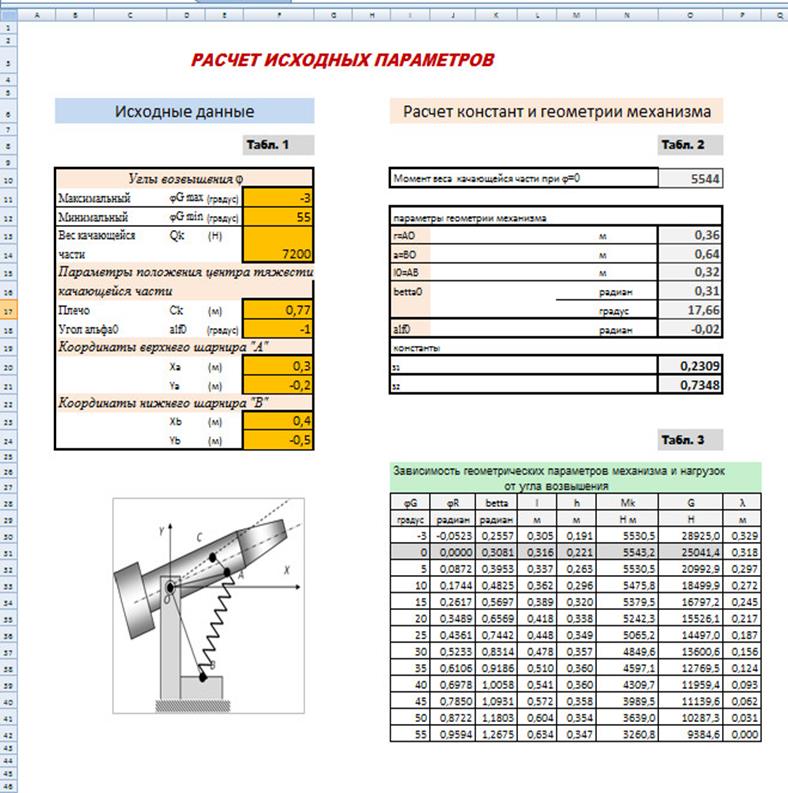
Рисунок 2.1 Лист расчета основных геометрических и силовых параметров примера в Excel
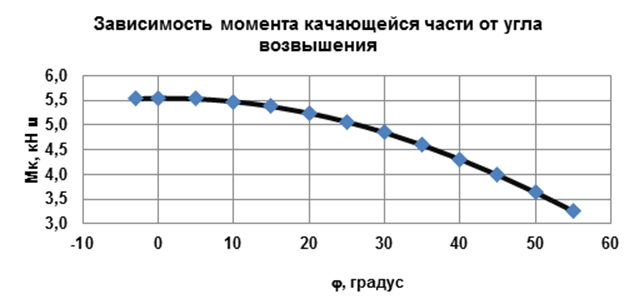
Рисунок 2.2
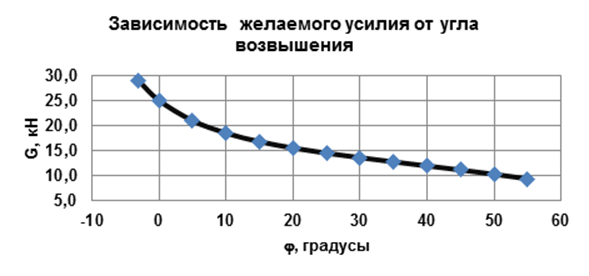
Рисунок 2.3
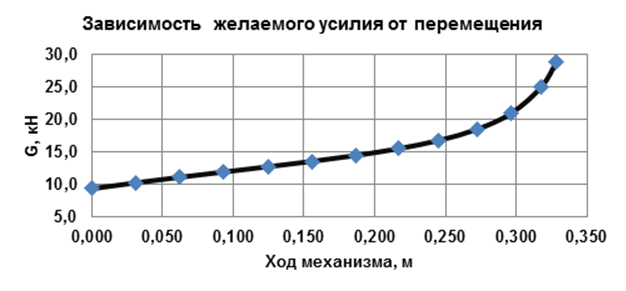
Рисунок 2.4
Зависимость рабочего усилия пружинного аккумулятора, представленного одной пружиной, от хода механизма принято определять линейной функцией (рис. 3.1). Эта зависимость может быть представлена в следующих формах:
![]() ;
;
![]()
где x(j)=l(j)-l(jmin); λ(j)=l(jmax)-l(j).
Для расчетов наиболее интересна последняя зависимость, которая представима в дискретном виде:
![]() (3.1)
(3.1)
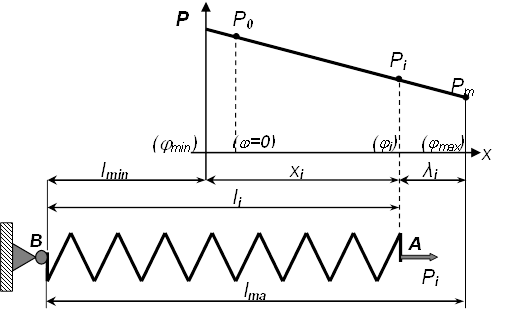 |
Рисунок 3.1 Схема усилия пружинного аккумулятора
Исходной информацией для синтеза аккумулятора является решение задачи, представленной в п. 2.
Параметрический синтез варианта пружины по “2-х точечной” схеме выполняется в следующей последовательности.
1. Создается рабочий лист книги «Синтез пружины»
2. Копируются на лист таблица 2.1 результатов с предыдущего листа
Режим копирования: «Специальная вставка – значения и форматы чисел».
3. Назначаются два расчетных угла jp1 и jp2
Выбор значений углов осуществляется в соответствии с рекомендациями п.1.4
4. Определяются
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.