– XA =…м; – YA =…м;
координаты неподвижного шарнира(B)
– XB =…м; – YB =…м.
Дополнительные условия, одинаковые для всех вариантов :
¾ диапазон углов вертикальной наводки -50≤ φ≤ 600;
¾ показатель политропы воздуха в пневмоцилиндре принять ν=1;
¾ число механизмов N=1.
Заполняемый бланк варианта задания представлен в Приложении А1.
Требуется:
· выполнить расчет начальных параметров механизма толкающего типа;
· провести параметрический синтез исходного варианта пружинного уравновешивающего механизма по двухточечной схеме;
· провести параметрический синтез исходного варианта пневматического уравновешивающего механизма по «двухточечной схеме»;
· оптимизировать параметры исходного варианта пневматического уравновешивающего механизма;
· определить необходимые размеры конструктивных элементов пневматического уравновешивающего механизма;
· выполнить анализ параметров оптимизированного варианта пневматического уравновешивающего механизма.
Таблица А1 - Варианты заданий
|
Вариант №А |
Qk, H |
Ck, м |
|
Вариант №B |
XА, |
YА |
XВ |
YВ |
|
0 |
5000 |
0,52 |
15 |
0 |
0,54 |
-0,15 |
0,6 |
-0,6 |
|
1 |
3450 |
0,64 |
6 |
1 |
0,54 |
-0,08 |
0,8 |
-0,6 |
|
2 |
14830 |
1,2 |
-3 |
2 |
0,33 |
0,13 |
0,82 |
-0,5 |
|
3 |
39800 |
0,96 |
2 |
3 |
0,69 |
-0,28 |
0,99 |
-0,94 |
|
4 |
9200 |
0,8 |
0 |
4 |
0,3 |
-0,2 |
0,4 |
-0,5 |
|
5 |
13500 |
1,08 |
-1 |
5 |
0,33 |
0 |
0,5 |
-0,3 |
|
6 |
10000 |
0,4 |
0 |
6 |
0,25 |
0,5 |
1,03 |
-0,12 |
|
7 |
9600 |
0,8 |
-2 |
7 |
0,7 |
-0,3 |
1,0 |
-0,9 |
|
8 |
12700 |
1,1 |
0 |
8 |
0,78 |
0,1 |
0,6 |
-0,5 |
|
9 |
6220 |
0,6 |
5 |
9 |
0,8 |
0,4 |
0,92 |
-0,5 |
БАЛТИЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ "ВОЕНМЕХ" им. Д.Ф. Устинова
Кафедра Е1
РАСЧЕТНАЯ РАБОТА
Расчет уравновешивающего механизма
Вариант задания № шифр задания
З а д а н и е:
Студент гр. Е181 Иванов И.И. .
Фамилия И.О.
Провести проектирование уравновешивающего механизма толкающего типа по следующим исходным данным:
тип орудия - …САО…………
вес качающейся части – Qk =…5000……H
положение центра тяжестикачающейся части:
– Ck = 0,5 2м; –α0 =50
координаты подвижного шарнира(А)
– XA = 0,54м; – YA = - 0,15м
координаты неподвижного шарнира(B)
– XB = 0,6м; – YB = - 0,6м
Дополнительные условия:
диапазон углов вертикальной наводки -50≤ φ≤ 600;
число механизмов N=1;
показатель политропы воздуха в пневмоцилиндре принять ν=1.
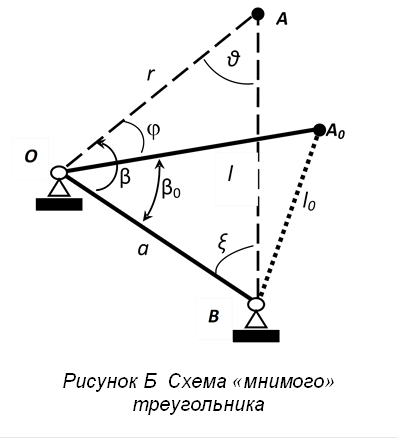
Для вывода коэффициентов приведения моментов трения в шарнирах к оси цапф орудия в зависимости от угла возвышения рассмотрим положение «мнимого» треугольника ОАВ (рис. Б) расчетной схемы толкающего уравновешивающего механизма:
 ;
;  .
.
Из треугольника ОАВ имеем следующие зависимости:
по теореме «sin»
 (Б1)
(Б1)
по теореме «cos»
![]() ;
; ![]() ;
;
![]() . (Б2)
. (Б2)
Согласно (Б1) имеем
 .
.
Выполняя дифферен-цирование по углу возвышения
 , получаем
, получаем
 .
.
При этом промежуточные производные имеют вид:
 ;
;  .
.
Последнее выражение получено преобразованием (Б2)
 .
.
После подстановки получаем
 , где из (Б2) следует
, где из (Б2) следует
 .
.
Проведя
аналогичные преобразования, определяем зависимость для вычисления ![]() :
:
 , где по (Б2)
, где по (Б2)  .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.