![]() При
вычислении текущего усилия целесообразно определять эффективную силу
пневматического аккумулятора с учетом силы трения уплотнительных устройств в
конструкции УМ:
При
вычислении текущего усилия целесообразно определять эффективную силу
пневматического аккумулятора с учетом силы трения уплотнительных устройств в
конструкции УМ:
![]() ,
, ![]() .
.
Эффективная сила УМ определяется зависимостью:
![]() .
.
где су – коэффициент силы трения (в первом приближении су≈ 0,05…0,12); ly – длина рабочей части уплотнения; μ≈0,07 – коэффициент трения в паре шток уплотнитель.
Эффективный момент уравновешивающего механизма
![]() .
.
Формулу (6.1) элементарной работы можно преобразовать к виду:
ΔМi = MЕyi – Mкi ± (Toi + TАi×kai+ TΒi×kbi),
где kai = dθ/dφ; kbi = dξ/dφ – коэффициенты приведения моментов трения в шарнирах уравновешивающего механизма
 ;
;
 ,
,  .
.
Вывод коэффициенты приведения моментов трения рассмотрен в Приложении Б.
Моменты трения выражаются формулами:
![]()
![]()
![]()
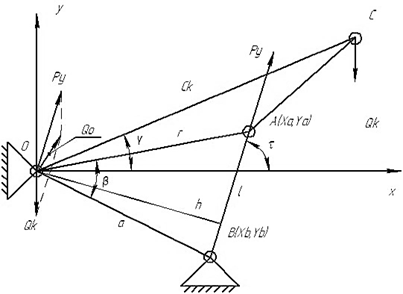
где ρt - приведенный радиус трения в опорах, Qо – усилие контакта в шарнире цапф. Приведенные радиусы трения в опорах и цапфе зависят от их конструкции, состояния опор и коэффициентов трения f: ρ=fpr×rop. Для шаровой пятки этот вопрос рассмотрен в п. 5.3.
Реакция
оси цапф (см. рис.6.2): ![]() ;
;
![]() ;
; ![]() ;
;
 .
.
Программирование рассмотренной задачи на Excel предлагается читателям выполнить самостоятельно.

Качество проектного решения уравновешивающего механизма принято оценивать по допускаемому усилию на маховике механизма вертикальной наводки:
Рm= DMEmax/(u×h×rm)£ [ Рm], где DMEmax – максимальный эффективный момент неуравновешенности; u, h, rm – передаточное отношение, кпд, радиус маховика механизма вертикальной наводки, [ Рm] – эргономически допустимое усилие на маховике.
Согласно эргономическим требованиям:
Ø радиус маховика ручного механизма наводки при работе одной рукой должен быть rm£ 0,15…0,25 м;
Ø наводчик как источник энергии обладает мощностью Nd =75 Вт , совершая при спокойной работе nd = 90…120 однообразных движений в минуту (об/мин).
Принимая эти условия несложно вычислить:
[ Рm] £ 30×Nd /( B×nd ×rm)@ 24…53 Н.
По ГОСТ 12.2.049-80 ССБТ при конструировании органов управления и их размещении в моторном поле рабочего места должны быть учтены следующие физиологические особенности двигательного аппарата человека: скорость движения рук больше при движении в направлении «к себе», меньше - при движении «от себя»; скорость движения правой руки больше при движении слева - направо, левой руки - справа - налево; линейная скорость вращательных движений рук больше скорости поступательных движений; скорость плавных криволинейных движений рук больше скорости прямолинейных движений рук с резким изменением направления; точность движения рук больше при работе в положении сидя, меньше - при работе в положении стоя….
Усилия, необходимые для осуществления управляющих действий, должны устанавливаться с учетом способа перемещения органа управления (пальцами, кистью с предплечьем, всей рукой, стопой и т.д.), частоты использования с учетом продолжительности непрерывного воздействия на органы управления, скорости выполнения управляющего действия и положения человека в процессе управления.
Пример зависимости допустимых усилий вращения маховика с рукояткой от способа управления, скорости и времени вращения для общемашиностроительного оборудования приведен в приложении к ГОСТ 12.2.049-80 и ниже в таблице.
Таблица допустимых усилий вращения маховика при положении стоя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.