·
диапазон
углов вертикальной наводки ![]() ;
;
· конструкция верхнего станка.
По конструкции качающейся части определяют (рис. 1.1):
1. QK - вес качающейся части;
2.
координаты
положения центра тяжести качающейся части С, которые в полярной
системе координат относительно оси цапф О при![]() могут
быть заданы: расстоянием до центра тяжести - СK=ОС=ОС0;
конструктивным углом "0.
могут
быть заданы: расстоянием до центра тяжести - СK=ОС=ОС0;
конструктивным углом "0.
По конструкции качающейся части и верхнего станка определяют вероятные координаты положения шарниров крепления уравновешивающего механизма.
Для выполнения практических расчетов студентами по дисциплине «Проектирование …» предусмотрены задания на проектирование уравновешивающего механизма, представленные в Приложении А и Б.
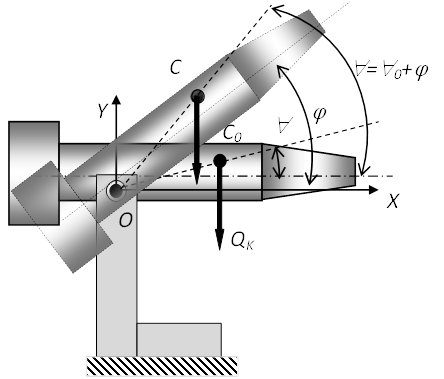 |
Рисунок 1.1 – Схема определения момента веса качающейся части
Момент веса качающейся части, в соответствии с рисунком 1.1, является величиной переменной, зависит от угла возвышения j и определяется зависимостью вида:
![]() , (1.1)
, (1.1)
где "=j+"0 , j - текущее значение угла возвышения.
Постоянная
составляющая момента равна ![]() .
.
Для компенсации этого момента, выполняется уравновешивание качающейся части, т.е. конструктивно создается момент обратного знака, который называется уравновешивающим моментом MY= MY(j).
Полное уравновешивание достигается при условии
MY(j)=MK(j) (1.2)
в
пределах сектора вертикальной наводки ![]() .
.
Однако, на практике независимо от вида уравновешивания возможно только теоретически полное уравновешивание, т.е. выполнение условия (1.2). В действительности всегда имеет место момент неуравновешенности
![]() . (1.3)
. (1.3)
Этот момент и определяет величину усилия на маховике механизма вертикальной наводки.
Основными причинами появления момента неуравновешенности являются:
· переменные по величине и знаку (в зависимости от наводки качающейся части вверх (+) или вниз (-)) моменты трения (Ti ) в шарнирах цапф и уравновешивающих механизмов, в уплотнениях при использовании пневматических аккумуляторов
 ; (1.4)
; (1.4)
· наличие на качающейся части расходуемых боеприпасов;
· влияние внешней среды на работу и износ элементов конструкции уравновешивающих механизмов.
Влияние температуры внешней среды на уравновешивание снижается с помощью температурного регулятора – дополнительного приспособления уравновешивающих механизмов.
Так как независимо от способа полное уравновешивание осуществимо только теоретически, то целесообразно гарантировать перевес казенной части. В этом случае реакции шестерни на секторе подъемного механизма и шарнире верхнего станка не будут менять своего направления до и после выстрела. Это снижает риск появления дополнительных ударных нагрузок на элементы конструкции орудия.
При проектировании уравновешивания правильно выполнять условие (1.3) в виде:
![]() . (1.5)
. (1.5)
Задача синтеза структур проектируемых объектов заключается в определении состава элементов, способах их соединения и алгоритмов взаимодействия между собой, определяющих кинематическую схему и рабочий процесс проектируемых объектов. Эта задача относится к наиболее трудно формализуемым.
Применительно к уравновешиванию качающейся части задача решается на основе анализа существующих способов статического уравновешивания (рисунок 1.2):
1. Грузового - утяжеление казенной части орудия, находящейся ниже оси цапф;
2. Применением специального устройства - уравновешивающего механизма, создающего момент, противоположный по знаку и примерно равный моменту от действия силы тяжести качающейся части на всем допустимом диапазоне углов возвышения.
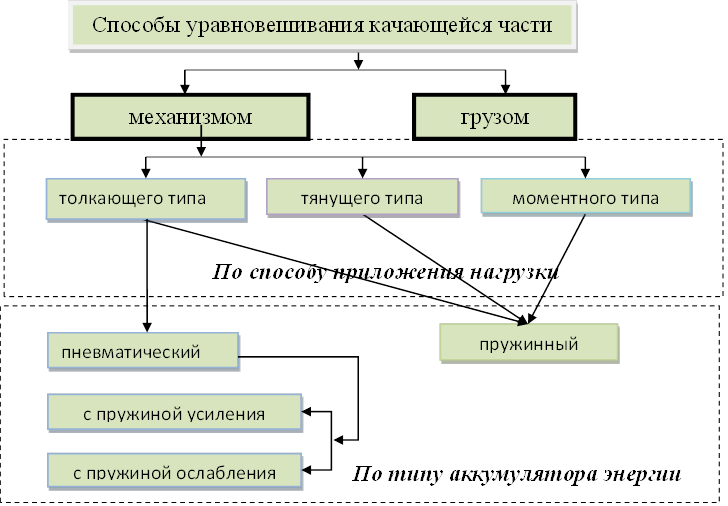 |
Рисунок 1.2. Классификация способов уравновешивания
Утяжеление казенной части орудия нежелательно из-за увеличения общего веса орудия, что снижает его тактическую маневренность. Грузовое уравновешивание используется в орудиях, стреляющих с подвижного основания (танковых, корабельных), где качающиеся части подвержены колебаниям носителя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.