Оформлення роботи. Результати вимірювань та розрахунків
заносяться в таблиці. По і робиться аналіз отриманим даним будуються графіки V=f(р,n), V=f(р,d),![]() S=f(t) і робиться аналіз та встановки одержаних результатів. Необхідно,
особливо, звернути увагу на стабільність швидкості руху в першому (з регулятором
потоку) і другому (з дроселем з каліброваними отворами) випадках і пояснити їх
відмінність і переваги кожного.
S=f(t) і робиться аналіз та встановки одержаних результатів. Необхідно,
особливо, звернути увагу на стабільність швидкості руху в першому (з регулятором
потоку) і другому (з дроселем з каліброваними отворами) випадках і пояснити їх
відмінність і переваги кожного.
ЛАБОРАТОРНА РОБОТА №5
ЕКСПЕРЕМЕНТАЛЬНА ПОБУДОВА ПНЕВМАТИЧНОЇ ДИСКРЕТНОЇ СИСТЕМИ АВТОМАТИЧНОГО УПРАВЛІННЯ (САУ) ЗА ЗАДАНИМИ УМОВАМИ РОБОТИ
Мета роботи: 1) практичне вивчення видів управління, які використовуються в пневмосистемах та побудовах відповідних схем;
2) експериметальна перевірка побудованих схем.
Порядок виконання роботи
1. Вивчити принципову схему і ознайомитись з конструкцією лабораторного стенду.
2. Ознайомитися з засобами реалізації структурних схем, які є на стенді. З’ясувати призначення окремих елементів і способів їх монтажу при побудові системи керування виконавчими приводами.
3. Зібрати і перевірити найпростіші системи керування одним виконавчим приводом, використовуючи види керування: шляхове, часове, по тиску та змішане.
4. Побудувати САУ згідно заданих умов.
5. Зібрати та перевірити побудовану САУ на стенді.
Описання стенду
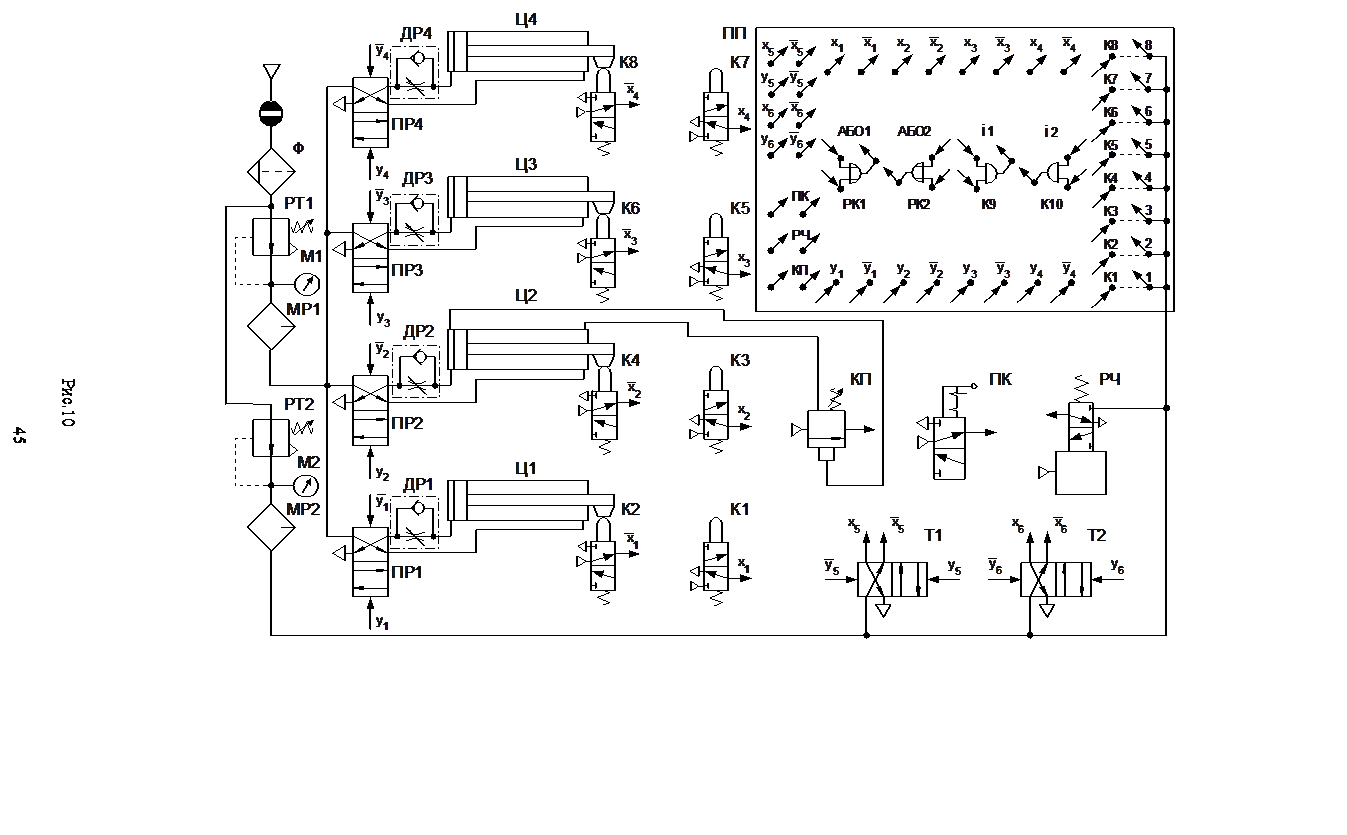
Стенд дозволяє побудувати пневматичні схеми керування середньої складності. Об’єктами керування є чотири пневмоциліндри Ц1, Ц2, Ц3 і Ц4 двусторонньої дії (рис. 10). Кожний з них має повітророзподільник типу В63-23 з двустороннім пневмоуправлінням — ПР1, ПР2, ПР3, ПР4, а також дроселі з зворотними клапанами типу В77-12 — Др1, Др2, Др3 і Др4. Підвід стислого повітря до повітророзподільників виконано через стандартну підводку: фільтр-вологовіддільник Ф типу В41-13, регулятор тиску РТ1 типу В44-23. Тиск повітря в ланцюзі живлення приводів контролюється манометром М1.
Управляюча частина стенду відокремлена і має самостійну лінію живлення, на якій встановлені регулятор тиску РТ2 і маслорозпилювач МР. Тиск повітря в системі управління контролюється манометром М2.
 |
|||
До управляючої частини стенду входять:
1) програмна панель ПП, на якій складається потрібний цикл;
2) шляхові трьохканальні клапани К1 — К8 типу БВ76-21 і ГВ76-21, які контролюють граничні положення штоків пневмоциліндрів;
3) пусковий клапан ПК типу ДВ76-21, який служить для пуску системи і зупинки її в вихідному положенні;
4) реле часу РЧ типу В61-21, яке забеспечує витримку часу при подачі командного сигналу;
5) клапан послідовності КП типу В62-21, який контролює за тиском спрацювання пневмоциліндра Ц2;
6) тригери Т1 і Т2 з роздільними входами — елементи «пам’яті», функцію яких виконують повітророзподільники типу В63-23 з двостороннім пневмоуправлінням;
7) розподільні клапани РК1 та РК2, які реалізують логічні операції — «АБО»;
8) трьохканальні клапани з пневмоуправлінням К9 та К10 типу В67-21, які реалізують логічні операції «І»;
Виходи клапанів К1 — К8, реле часу, клапана послідовності, а також виходи тригерів утворюють вихідні сигнали системи управління. Клапани К9, К10, РК1 і РК2, тригери Т1 і Т2 виконують роль логічних операторів. Логічна операція «І» може бути також реалізована шляхом послідовного з’єднання клапанів або підключенням клапана до виходу тригера, що спрощує структуру САУ і поширює можливості стенду.
Виходами системи керування є сигнали, які керують перемиканням повітророзподільників та тригерів.
Прямі та інверсні вхідні
сигнали позначені через ![]() та
та ![]() з відповідними індексами. Вихідні позначені через
з відповідними індексами. Вихідні позначені через ![]() та
та ![]() .
.
На програмній панелі є:
1) 8 точок підводу живлення (1, 2, 3, 4, 5, 6, 7, 8);
2) 8 входів клапанів К1 — К8 (К1, К2, К3 і т.д.);
3) 8 виходів клапанів К1
— К8 (![]() ,
, ![]() ,
, ![]() і т.д.);
і т.д.);
4) 8 входів пов’язаних з
порожнинами управління повітророзподільників (![]() ,
, ![]() ,
, ![]() ,
, ![]() і т.д.);
і т.д.);
5) 4 входи пов’язані з
порожнинами управління тригерів ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
;
6) 4 виходи тригерів ![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
;
7) по одному входу та виходу пускового клапана ПК, реле часу РЧ, клапана послідовності КП;
8) 4 входи і 2 виходи розподільних клапанів РК1 і РК2;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.