Ак= 20lg qмах e1мах = 20 lg q1мах/qмах=20 lg W1махW1мах/qмахe1мах= (5.5.)
|
= 20 lg KW(W1мах/e1мах) |
Движение с постоянной скоростью: g(t)=Wt.
Хуст.= ½G(p)/ (1+W(p))½p®0 = W/KW; KW=W/ X уст.
Движение с постоянным ускорением:
G(t)=et2/2; xуст.= ½G(p)/ (1+W(p))½p®0= e/Ke; Ke= e/xуст.;
Движение по гармоническому закону:
G(t)=q1(t)=q1maxsin wkt
Xуст.=½(q1(p)/ (1+w(p)))p½p®0;
p=jwqmaxxmax = q1max/½1+w(jwk)½@q1max/½W(jwk)½= q1max/ A(wk);
L(wk)= 20 lg A(wk)=20 lg q1max/x max= 20 lg W12max/e1maxqmax
Требования к низкочастотной части ЛАХ.
q1(t)=q1max sin wkt
qmax= ½Fe(jwk)½q1max= q1max/½1+W(jwk)½»q1max/½W(jwk)½
Чтобы входящее воздействие воспроизводилось с ошибкой не больше
ЛАХ системы должна проходить не ниже контрольной точки Ак с координатами:
L(wk)= Ak= 20 lg ½W(jwk)½= 20 lg q1max/qmax= 20 lg W21max/qmaxe1max
Wk=e1max/W1max; q1max=W21max/e1max (*)
1. Амплитуда скорости W1=W1мах
e1<e1мах
Из (*), тогда Wk¯, q1max Þ Ak влево по прямой с наклоном 20 db/dec.
В пределе если e1=0, wk®0 это соответствует режиму вращения с постоянной скоростью, для которого qмах= W1мах/КW,
Где КW - предельное значение для задетой ошибки.
2. e1=e1мах
W1=W1мах
Из (*) тогда wk, q1max¯ Þ Ak вправо по прямой с наклоном 40 db/dec.
W02=Ke, Ke= e1max/qmax/
5.2.2. Определение добротности СС без учета момента нагрузки (Мсм=0).
Работа СС без учета нагрузки является идеальным случаем, однако рассмотрение такого режима позволяет оценить величины скоростной ошибки и ошибки ускорения, а также яснее представить физику процесса слежения. Учет влияния момента нагрузки в дальнейшем позволит определить добавочную моментальную ошибку и необходимое увеличение добротности системы для обеспечения заданной динамической точности.
Найдем максимальное значение ошибки слежения для случая Мсм=0.
q1max= q1max/½1+W(jwk)½ (5.6.)
где W(jwk) - значение частотной передаточной функции разомкнутой системы при частоте входного сигнала wk.
Так как в реальных СС ½1+W(jwk)½>>1, то выражение (5.6.) можно представить в следующем виде:
q1max= q1max/½W(jwk)½ (5.7.)
Учитывая, что частота качки wk обычно значительно меньше второй сопрягающей частоты w2 (рис.5.3.) частотная передаточная функция желаемой ЛАХ имеет вид:
KW______ w=wk
W(jw) » jw(1+jT1w) (5.8.)
где KW [1/c] - добротность системы по скорости.

Определим значение передаточной функции по ошибке при частоте качки wk из выражения (5.8.) и нейдем выражение для максимальной ошибки по формуле (5.7.):
qmax=½(jwk(1+T1wk) q1max / KW ½=½j(W1мах/КW) - e1maxT1/ KW ½= W1мах/КWÖ1+w22T12
(5.9.)
Где W1мах= wk q1max - амплитуда скорости качки;
e1max =- wk2q1max - амплитуда ускорения качки.
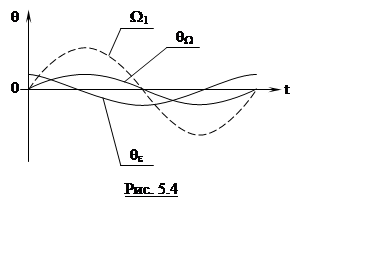
При синусоидальном изменении скорости на входе ошибка, как следует из (5.9.), будет изменяться по закону:
q(t)=qW+qe=qWmax sin wkt + qemaxcos wkt (5.10.)
где:
qW=qWmax sin wkt=W1мах/КW sin wkt (5.11.)
- скоростная ошибка, а
qe=qemaxcos wkt= e1maxT1/ KWcos wkt=emax/Ke cos wkt (5.12.)
- ошибка ускорения.
Здесь Ke = КW/ T1 [1/сек2] - добротность по ускорению.
На рис. 5.4. представлены кривые изменения скорости качки (W1), скоростной ошибки (qW) и ошибки ускорения (qe) .
Известно, что добротность СС по
скорости KW равна
частоте, при которой первая асимптота ЛАХ (рис.5.3.), имеющая наклон – 20 db/dec
пересекает ось нуля децибел. Добротность по ускорению Ke
равна квадрату частоты, при которой
вторая асимптота ЛАХ, имеющая наклон – 40 db/dec
пересекает ось нуля децибел, иными словами, Ke равна
квадрату базовой частоты w0.
|
w0= Ö Ke = Ö КW/ T1 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.