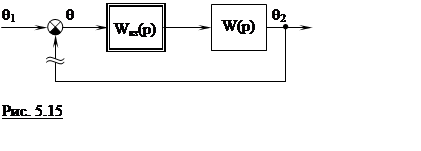
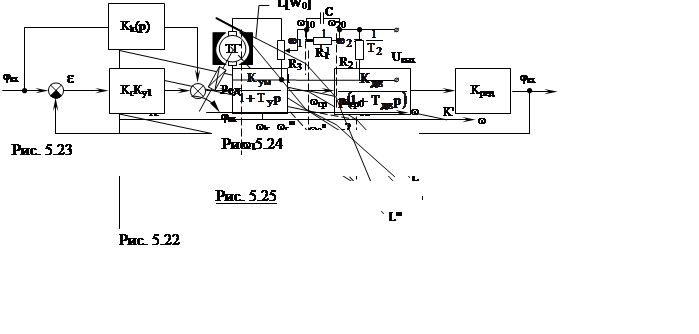
Пример. Рассчитать параметры следящей системы с комбинированным управлением, структурная схема которой изображена на рис.5.24., обеспечивающие максимальную ошибку слежения Е мах£ 0,2° при отработке гармонического сигнала с параметрами Wмах=180°/С, амах=150°/С2. Показатель колебательности системы М£1,4. Параметры системы: Кс=0,1 В/град.; К у.м.=25; Ту= 0,05 с; Кgb=6,25 рад/(В с); Тдв= 0,1 С; К ред=0,005.
Решение. Определим коэффициент передачи системы, обеспечивающий показатель колебательности М=1,4, по выражению
М2+МÖМ2-1 1,42+1,4Ö1,42-1
Кu= 2SТ = 2(0,1+0,05) = 11с-1
Рассчитаем коэффициент усиления предварительного усилителя, приняв
Кu=10 с-1:
Кu_______ 10_____________
Ку1= КсКумКдвКред = 0,1*57,3*25*6,25*0,005 =2,24
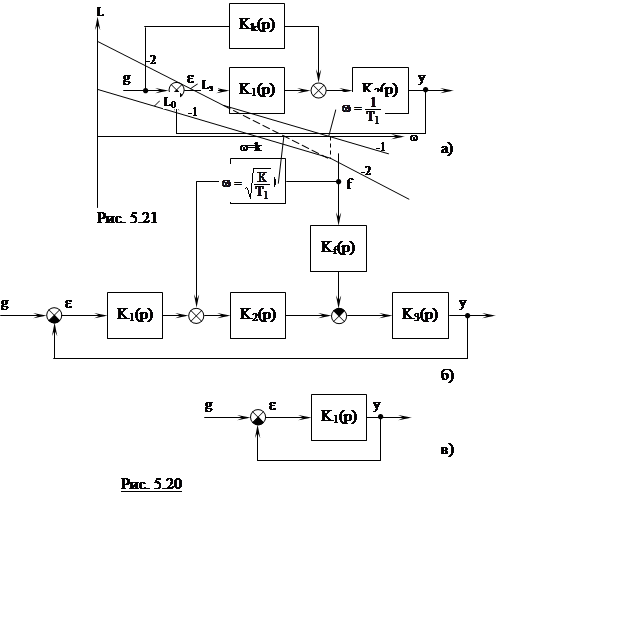
Найдем передаточную функцию по ошибке в системе без компенсирующей цепи:
__1____ 1_________ р+0,15р2+0,005р3
Кeg(р)= 1+К(р) = 1+ Кu_________________ = 10+р+0,15р2+0,005р
Р(1+Тдвр)(1+Тур)
Разделив полином числителя на полином знаменателя, найдем коэффициент ошибок:
Сog=0; C1g= 1/Кu=0,1с; С2g= SТ/ Кu-1/Кu2=0,15/10-1/100= 0,005 с2;
С4g= 1/Кu[(ТдвТу- (Тдв+Ту)/Кu) – 1/Кu(Тдв+Ту-1/Кu)]= -0,0015 с3
Вычислим составляющие по скорости, ускорению и третьей производной:
Еu= Wмах/Кu= 180/10=18°; Еа=амахС2д=150*0,005=0,75°;
Еа= - амахwkcзд= - (а2мах/Wмах) Сза= (1502/180)*0,0015=0,185°<Еgon=0,2°
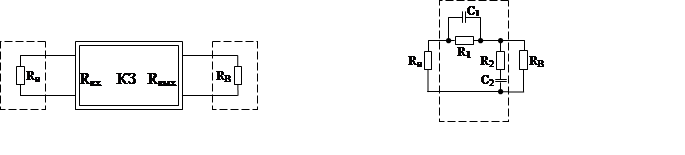
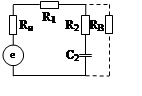
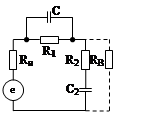
Для обеспечения заданной точности необходимо компенсировать ошибки по скорости и ускорению, т.е. ввести компенсирующие сигналы по скорости и ускорению движения командной оси. Для компенсации ошибки используем тахогенератор и пропорционально-дифференцирующий RC- контур (рис.5.25.).
Их передаточные функции: Ктг(р)=Ктгр; Кrc(p)=Rrc (1+Tp)/(1+Tnp), где Кrc=Tn/Т.
Тахогенератор соединяется с командной осью через повышающий редуктор, передаточное отношение которого ip2 выбирается из условия согласования скоростей или из условия допустимого момента нагрузки на командную ось. Определим возможное передаточное число редуктора, считая номинальную частоту вращения тахогенератора П т.г.ном=2000 об/мин:
Кр2=шр2£ Wт.г.ном/ Wмах= 2000*360/60*180=66,7
Передаточная функция компенсирующей цепи:
А1р+а2р2
Кк(р)=Ктг(р)Кrc(р)= 1+Тnр , где а1=Кр2КтгКкс; а2=а1Т
Найдем передаточную функцию по ошибке с учетом компенсирующей цепи:
А1р+а2р2 К2_______________
1-Rr(p)K2(p) 1- 1+Тnр р(1+Тдвр)(1+Тур)_
Кeg(p)= 1+К(р) = 1+ ________Кu_____ =
Р(1+Тдвр)(1+Тур)
(1-а1к2)р+(Тдв+Ту+Тn-а2к2)р2__ ТдвТуТnр4__________________
= [р(1+Тдвр)(1+Тур)+Кu] (1+Тnp) + [р(1+Тдвр)(1+Тур)+Кu](1+Тnр)
Приравняв к нулю коэффициенты при р и р2 в числителе, найдем условия компенсации ошибок по скорости и ускорению:
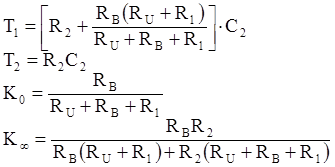
А1=1/К2; а2=(Тдв+Ту+Тn)/К2
Рассчитаем коэффициенты а1 и а2, приняв Тn=0,2; Ту=0,01с:
А1= 1/КумКдвКред=1/25*6,25*0,005=1,28 Вс/рад
А2= (Тдв+Ту+Тn)/К2=(0,1+0,05+0,01)/0,78=0,2 Вс2/рад
Определим требуемую постоянную времени дифференцирующего контура:
Т= а2/а1=0,2/1,28=0,156с
Найдем коэффициент передачи RC-контура:
Кrc=Тn/Т=0,01/0,156=0,064
Приняв коэффициент передачи редуктора Кр2=50, найдем требуемый коэффициент передачи тахогенератора:
Ктг=а1/Кр2Кrc = 1,28/50*0,064=0,4 Вс/рад
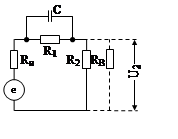
Рассчитаем параметры RC-контура. Зададимся величиной емкости с=1 мкф и определим:
R1=T/C=0,156/10-6=156 ком
Вычислим величину сопротивления R2:
R2=(Кrc/1-Krc)R1=(0,064/1-0,064)*156=10,7 ком
Регулировка крутизны тахогенератора осуществляется потенциометром R3.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
 |



 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

 Дифференцирующее
Дифференцирующее

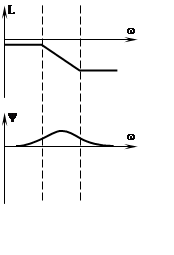
 Интегрирующее
Интегрирующее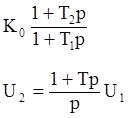

 Интегро-диференцирующее
Интегро-диференцирующее
