![]()
Оно выполняется, если
![]()
![]()
или
![]()
![]()
Таким образом, определены алгоритмы
настройки коэффициентов регулятора. Адаптивная система, рассчитанная вторым
методом Ляпунова, представлена в виде структурной схемы на рис. 3.15, где
приняты следующие обозначения: ![]() .
.
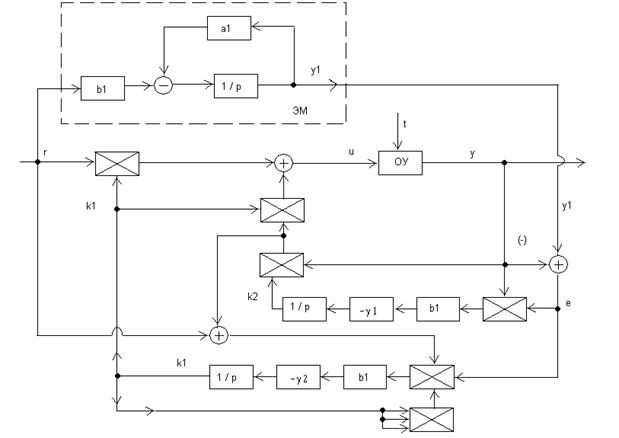
Рис. 3.15
Рис. 3.16 иллюстрирует процессы в
системе с постоянными параметрическими возмущениями (![]() =5,
=5,
![]() =10 ,
=10 , ![]() (0)=1).
Влияние изменяющихся параметрических возмущений на выходные процессы системы,
регулятора и адаптора приведены на рис. 3.17 (
(0)=1).
Влияние изменяющихся параметрических возмущений на выходные процессы системы,
регулятора и адаптора приведены на рис. 3.17 (![]() ,
, ![]() =30,
=30, ![]() =40,
=40, ![]() (0)=1,
(0)=1,![]() (0)=1).
(0)=1).
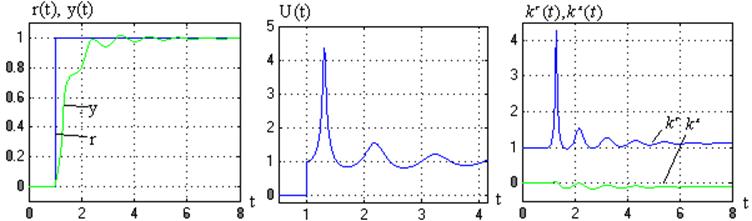
Рис. 3.16
Замечание: В рассмотренных классах систем прямого адаптивного управления для реализации регулятора и адаптора требуется текущая информация о координатах состояния или производных выходной переменной. Эта информация может быть получена с помощью наблюдателя в виде асимптотического идентификатора или фильтра оценки производных (ФОП). Введение дополнительного динамического звена в обратную связь увеличивает порядок замкнутой системы. Наблюдатели (или ФОП) влияют на качество выходных процессов. Особенно это проявляется при ненулевых значениях начальных координатных или параметрических рассогласований. Обладая широкой полосой пропускания, наблюдатели и ФОП ухудшают помехозащищенность систем управления.
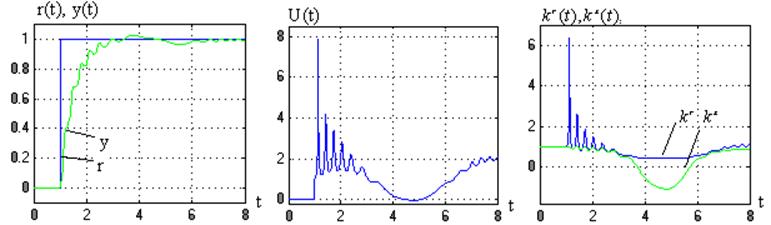
Рис. 3.17
Следует также обратить внимание на следующее: синтез алгоритмов адаптации проведен для квазистационарных объектов, поэтому отсутствуют условия выбора коэффициентов передачи адапторов. Особенностью алгоритмов, синтезированных градиентным методом и методом Ляпунова, являются ненулевые начальные условия в контурах настройки коэффициентов при управляющем воздействии.
Изменение параметров объекта управления может привести к увеличению амплитуды коэффициентов регулятора не только в переходном процессе, но и установившемся. Это приводит к необходимости расширения зоны нечувствительности релейных элементов, если они используются в адапторе, или введения ограничения на уровень выходных сигналов контуров настройки.
3.5 Вопросы
1. Увеличение коэффициента передачи разомкнутой системы уменьшает или увеличивает зависимость свойств системы от изменения параметров?
2.
Изменение коэффициента по
алгоритму  обеспечивает спуск в локальный минимум или
максимум функции
обеспечивает спуск в локальный минимум или
максимум функции ![]() ?
?
3. Какой вид целевой функции используется при расчете системы вторым методом Ляпунова и почему?
4.
Каким методом получен
алгоритм адаптации вида ![]() ?
?
5. Какой алгоритм адаптации обладает лучшим быстродействием интегральный или пропорционально-интегральный?
6. Почему идеальный закон управления нереализуем?
7.
Как называется алгоритм
вида  ?
?
8. Нужен ли наблюдатель для системы, описанной в примере 3.1?
9. В расчете каких систем используется обобщенная ошибка и почему? Как называется метод синтеза?
10. Какая форма АСГ имеет вид  ?
?
11. Какое устройство описывает уравнение ![]() ?
?
12. С помощью какой формы АСГ можно получить интегральный алгоритм адаптации?
13. Каким методом определен закон управления в рассмотренных системах?
14. Какой тип адаптации использован в рассмотренных системах?
15.*Требуется ли дополнительное исследование устойчивости замкнутой системы при расчете ее вторым методом Ляпунова?
16.*Как влияет коэффициент передачи адаптора на темп настраиваемых параметров регулятора?
17.*Как выбрать начальные условия в адапторе для улучшения качественных показателей выходных процессов?
18. *В контурах настройки каких коэффициентов нельзя использовать нулевые начальные условия и почему?
19.*В расчете каких систем используется гипотеза квазистационарности?
20.*Какими методами можно синтезировать алгоритм вида ![]() ?
?
21.*Система синтезирована с помощью АСГ. Повлияет ли введение наблюдателя состояния в виде асимптотического идентификатора на парирование быстроменяющихся параметрических возмущений?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.