Впоследствии метод стали использовать для оценивания быстродействия системы. Примерно в 70-е годы прошлого столетия метод нашел применение в задачах синтеза адаптивных регуляторов. Термины «функция Ляпунова» и «прямой метод Ляпунова» введены Н.Г. Четаевым в 1946 г.
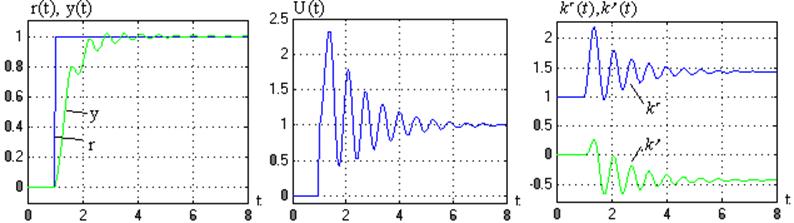
Рис. 3.12
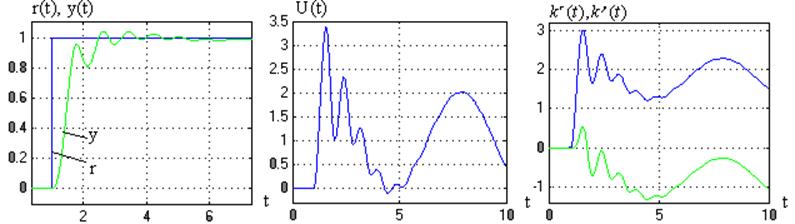
Рис. 3.13
Рассмотрим синтез адаптивных регуляторов методом функций Ляпунова для линейного объекта управления, модель которого имеет вид (3.25)
![]()
где х ÎRn– вектор состояния, uÎRm – вектор управления, n ≥ m; A, B –
неизвестные матрицы параметров объекта управления, dimA = nxn, dimB = nxm, ![]() ,
, ![]() . Коэффициенты матриц А, В заранее не известны.
Известно лишь, что значения коэффициентов ограничены, т.е.
. Коэффициенты матриц А, В заранее не известны.
Известно лишь, что значения коэффициентов ограничены, т.е.
![]() для всех i, j, r, p.
для всех i, j, r, p.
Вектор состояния считается доступным измерению, поэтому y = x, y – вектор выходных переменных.
Желаемая динамика задаётся эталонной моделью вида (3.26)
![]()
где хм ÎRn – вектор состояния эталонной модели, rÎRm – вектор задающих воздействий. Выбор эталонной модели зависит от требований, предъявляемых к замкнутой системе (времени переходного процесса, перерегулирования, астатизма и т.д.). Эталонная модель должна быть устойчивой, т.е. матрица коэффициентов Ам – гурвицева, поэтому уравнение det (pI – Aм) = 0 имеет все корни с отрицательной вещественной частью, I – единичная матрица соответствующей размерности; Вм – матрица полного ранга.
Цель функционирования системы зададим предельным уравнением (3.27)
![]()
где e(t) – ошибка системы.
Объект управления (3.25) подвержен действию параметрических возмущений. Поэтому в дальнейшем рассмотрим синтез системы с параметрической адаптацией.
Сначала полагаем, что параметры ОУ известны. Для получения структуры «идеального» регулятора запишем уравнение в отклонениях
![]() ,
,
![]() ,
,
![]() . (3.43)
. (3.43)
Условие разрешимости задачи синтеза согласно (3.43) имеет вид
![]() . (3.44)
. (3.44)
Разрешая уравнение (3.44) относительно u(t), получим
![]()
помножим слева каждую часть уравнения на BT
![]()
полагаем det (BTB) ¹ 0 , запишем уравнение «идеального» регулятора
![]() . (3.45)
. (3.45)
Полученное выражение аналогично закону управления в системах со скоростным градиентом. Если реализовать управление вида (3.45), то система будет описываться уравнением
![]()
Решение этого уравнения равномерно асимптотически устойчиво в силу гурвицевости матрицы Ам. Следовательно, при «идеальном» законе управления (3.45) цель достигается. Уравнение (3.45) можно записать в виде
![]() (3.46)
(3.46)
где ![]() -
матрицы идеальных коэффициентов регулятора. Приравнивая коэффициенты в (3.45),
(3.46), найдём соотношение между ними, для коэффициентов при х:
-
матрицы идеальных коэффициентов регулятора. Приравнивая коэффициенты в (3.45),
(3.46), найдём соотношение между ними, для коэффициентов при х:
![]()
![]()
![]() (3.47)
(3.47)
и для коэффициентов при r:
![]()
![]()
![]() .
(3.48)
.
(3.48)
После подстановки (3.48) в (3.47), имеем
![]() .
(3.49)
.
(3.49)
Условия (3.48), (3.49) называют условиями согласования модели и ОУ.
«Идеальный» закон
управления (3.45) или (3.46) не реализуем, так как параметры ОУ не известны.
Поэтому заменим идеальные коэффициенты регулятора (![]() )
настраиваемыми коэффициентами (kr, kx). Структура регулятора описывается уравнением
)
настраиваемыми коэффициентами (kr, kx). Структура регулятора описывается уравнением
![]() . (3.50)
. (3.50)
Выражение (3.50) называется реальным законом управления. Подставив (3.50) в модель ОУ, получим уравнение обобщенного настраиваемого объекта
![]() (3.51)
(3.51)
аргумент t опущен для упрощения записи.
На этом этапе расчета системы определяются уравнения, в соответствии с которыми настраиваются коэффициенты регулятора, т.е. алгоритмы изменения kr, kx. Получим описание обобщенного настраиваемого объекта в отклонениях. Введем обозначения
![]()
и подставим (3.50) в (3.43), тогда
![]() , учитывая, что
, учитывая, что ![]() , выполним преобразования
, выполним преобразования
![]() ,
,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.