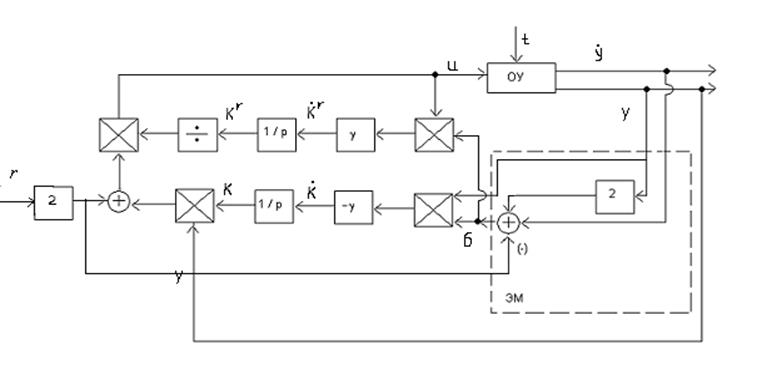
Рис. 3.6
По сравнению с предыдущим случаем (рис. 3.3, 3.4) в данной системе для достижения удовлетворительного качества выходных процессов требуется меньшее значение коэффициента передачи адаптора.
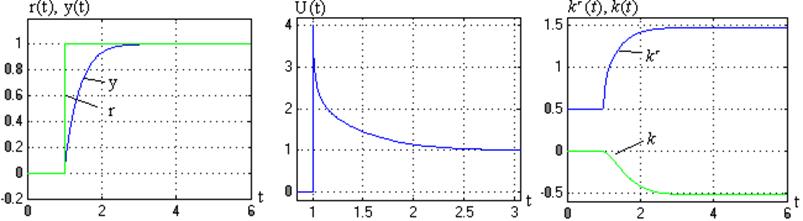
Рис. 3.7
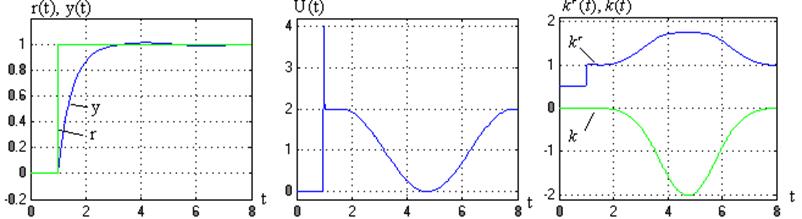
Рис. 3.8
3.3 Синтез адаптивных систем по схеме скоростного градиента
3.3.1 Общая характеристика схемы скоростного градиента
Идея схемы скоростного градиента принадлежит Красовскому А.А., который для задачи идентификации с адаптивной моделью предложил общий вид алгоритма адаптации, оптимального по критерию обобщенной работы. Алгоритм скоростного градиента (АСГ) нашел дальнейшее развитие в работах Фрадкова А.Л., Деревицкого Д.П., Андриевского Б.Р. и других специалистов в области теории управления. Суть метода скоростного градиента заключается в следующем: настройка параметров осуществляется в направлении, противоположном скорости изменения целевого функционала вдоль траектории обобщенного настраиваемого объекта.
Пусть ОНО описывается уравнением ![]() , где f (x,q, t) –
вектор-функция, q - вектор-функция
настраиваемых коэффициентов. Алгоритмом скоростного градиента
принято называть правило изменения настраиваемых коэффициентов (q ), задаваемое уравнением
вида
, где f (x,q, t) –
вектор-функция, q - вектор-функция
настраиваемых коэффициентов. Алгоритмом скоростного градиента
принято называть правило изменения настраиваемых коэффициентов (q ), задаваемое уравнением
вида
 (3.22)
(3.22)
где  - дифференциальный оператор, Г = Г Т
> 0 – квадратная матрица коэффициентов передачи,
- дифференциальный оператор, Г = Г Т
> 0 – квадратная матрица коэффициентов передачи,

здесь Q(.) – целевая функция; y– вектор-функция, удовлетворяющая условию псевдоградиентности:
![]() ,
,
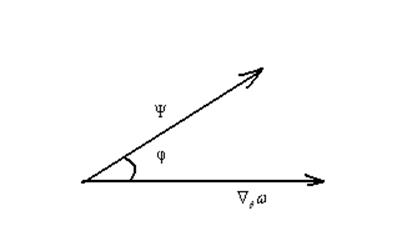
(см. Приложение 1). Это условие эквивалентно требованию,
по которому угол j между
векторами y и ![]() w
должен находиться в пределах от - 900 до + 900 (рис.
3.9). Условие псевдоградиентности выполняется, если
w
должен находиться в пределах от - 900 до + 900 (рис.
3.9). Условие псевдоградиентности выполняется, если
![]() или
или ![]()
(аргументы вектор-функции опущены для упрощения записи выражений),
ГiT = Гi > 0 – квадратная матрица коэффициентов (i = 1, 2), Г2 – диагональная матрица, sgn (.) – вектор, состоящий из знаков компонент вектора Ñq w.
 - 900 ≤ j ≤ 900
- 900 ≤ j ≤ 900
Рис. 3.9
АСГ вида (3.22) называют алгоритмом в конечно-дифференциальной форме. Частными случаями (3.22) являются алгоритмы в дифференциальной форме (при y = 0)
 (3.23)
(3.23)
и в конечной форме (для Г = 0)
![]() (3.24)
(3.24)
где t - шаг дискретизации.
3.3.2 АСГ в системах с явной реализацией эталонной модели
Рассмотрим пример синтеза системы с параметрической адаптацией. Сформулируем задачу синтеза для объекта управления, который задан моделью в пространстве состояний
![]() (3.25)
(3.25)
где xÎRn , uÎRm – векторы состояния и входа ОУ, ![]() ,
, ![]() –
матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь,
что значения коэффициентов ограничены по модулю, т.е.
–
матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь,
что значения коэффициентов ограничены по модулю, т.е.
![]() для всех i, j, r, p.
для всех i, j, r, p.
Уравнение эталонной модели выбрано в форме
![]() (3.26)
(3.26)
где rÎRm– задающее воздействие, Ам – гурвицева матрица. Цель управления сформулирована относительно координатного рассогласования
![]() (3.27)
(3.27)
где e(t)=x(t)–xм(t). Предполагаем, для объекта (3.25) выполняются условия управляемости и наблюдаемости координат состояния. Пусть целевая функция имеет вид квадратичной формы
![]() (3.28)
(3.28)
Поставленная цель управления выполняется, если Q®0 при t®¥.
Синтез адаптивного регулятора начнем с определения уравнения
основного контура. Допустим, что ![]() ,
тогда справедливо равенство
,
тогда справедливо равенство ![]() . Вычтем (3.26) из
уравнения (3.25):
. Вычтем (3.26) из
уравнения (3.25):
![]()
затем разрешим полученное уравнение относительно u (t):
![]()
или ![]() . (3.29)
. (3.29)
“Идеальное” управление можно записать в форме
![]() (3.30)
(3.30)
где матрицы k*x, k*r удовлетворяют условию
![]()
![]()
![]() . (3.31)
. (3.31)
Матрицы идеальных значений коэффициентов регулятора k*x, k*r существуют, если выполняются ранговые условия
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.