![]() . (3.52)
. (3.52)
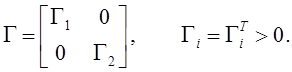
Обозначим расширенную матрицу
отклонений настраиваемых коэффициентов от их «идеальных» значений через ![]() ,
,
![]() , а вектор сенсоров - s, элементы этого вектора измеряются
или вычисляются на основе измерений,
, а вектор сенсоров - s, элементы этого вектора измеряются
или вычисляются на основе измерений,
 , dim s = p x 1, p = n + m.
, dim s = p x 1, p = n + m.
Уравнение (3.52) с учетом введенных обозначений примет вид
![]() .
.
Полученное уравнение является уравнением системы в отклонениях.
Исследование системы проведем с помощью функции, зависящей от координатных и параметрических рассогласований,
![]() , (3.53)
, (3.53)
где tr (.) – след матрицы, который определяется как сумма элементов главной диагонали (см. Приложение 1). В силу уравнения (3.52) определим производную по времени функции V :
![]()
![]() .
.
Вторая составляющая уравнения обращается в нуль, если
![]()
 (3.54)
(3.54)
Уравнение (3.54) описывает алгоритм адаптации в отклонениях. Производная исследуемой функции принимает вид
![]()
отрицательная определенность следует
из свойства гурвицевости матрицы коэффициентов эталонной модели ![]() и положительности матрицы Н,
удовлетворяющей уравнению Ляпунова:
и положительности матрицы Н,
удовлетворяющей уравнению Ляпунова:
![]()
Полагая медленное изменение
коэффициентов (![]() ) и учитывая ранее введенные
обозначения, получим вид алгоритмов адаптации:
) и учитывая ранее введенные
обозначения, получим вид алгоритмов адаптации:
![]() ,
(3.55)
,
(3.55)
![]()
![]()
![]()
![]()
![]()
Структурная схема адаптивной системы (3.25), (3.26), (3.46), (3.55) изображена на рис. 3.14 . Приняты следующие обозначения элементов схемы:
![]()
![]() .
.
Условия, при которых решена
поставленная задача, являются условиями идентифицируемости ![]() при
при ![]() и,
одновременно, асимптотической устойчивости в целом
и,
одновременно, асимптотической устойчивости в целом ![]()
Синтез адаптивной системы на основе второго метода Ляпунова состоит из следующих этапов:
1. Определение порядка и параметров эталонной модели;
2. Определение «идеального» закона управления;
3. Введение матриц идеальных коэффициентов регулятора;
4. Проверка условий согласованности модели и объекта управления;
5. Формирование реального закона управления;
6. Определение уравнения обобщенного настраиваемого объекта в отклонениях;
7. Проверка устойчивости системы вторым методом Ляпунова;
8. Определение условия отрицательной определенности производной выбранной функции относительно матрицы параметрических рассогласований;
9. Определение вида алгоритма адаптации.
Пример 3.3. Используя приведенную выше последовательность действий, выполним расчёт регулятора для одноканального объекта первого порядка
![]()
![]()
где ![]()
![]() Объект управления первого порядка, поэтому
желаемую динамику системы зададим уравнением
Объект управления первого порядка, поэтому
желаемую динамику системы зададим уравнением
![]()
![]() >0 , причем
>0 , причем ![]() так как в статике должно выполнятся
равенство
так как в статике должно выполнятся
равенство ![]() В процессе синтеза основного контура
получим уравнение системы в отклонениях
В процессе синтеза основного контура
получим уравнение системы в отклонениях
![]()
![]()
![]()
![]()
![]()
![]() (3.56)
(3.56)
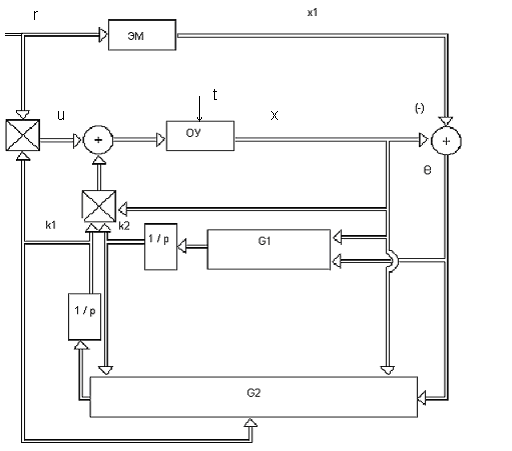
Рис. 3.14
Из условия разрешимости задачи синтеза основного контура определим “идеальный” закон управления:
![]()
![]()
![]()
![]()
Идеальные значения коэффициентов связаны с параметрами объекта и системы следующим образом
![]()
![]() (3.57)
(3.57)
В реальный закон управления введём коэффициенты ![]() :
:
![]() (3.58)
(3.58)
и модель обобщённого настраиваемого объекта запишем в виде
![]()
Используя обозначения параметрических рассогласований
![]()
и подставив (3.58) в (3.56) , запишем уравнение в отклонениях
![]()
Из (3.57) выражаем bи ![]() :
:

![]()
тогда уравнение в отклонениях можно записать в виде

К правой части последнего уравнения
добавим и отнимем ![]() , после чего получим
, после чего получим  или, учитывая
или, учитывая 
![]() (3.59)
(3.59)
Матрица отклонений и вектор сенсоров имеют вид
![]()
![]() (3.60)
(3.60)
Уравнение (3.59) с учётом (3.60)
преобразуем к виду ![]()
Анализ сходимости процессов в системе и одновременно определение алгоритма настройки коэффициентов выполним с помощью функции V:

где H=I
,  .
.
Определим полную производную выбранной функции
![]()
![]()
![]()
Алгоритм адаптации найдём из условия
![]() < 0 , для этого потребуем выполнения
равенства
< 0 , для этого потребуем выполнения
равенства
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.