 или
или  , где φ – функция
чувствительности. Данный алгоритм обеспечивает изменение настраиваемого
коэффициента в каждый текущий момент времени, направленное на минимизацию
функции цели. Принимая во внимание, что
, где φ – функция
чувствительности. Данный алгоритм обеспечивает изменение настраиваемого
коэффициента в каждый текущий момент времени, направленное на минимизацию
функции цели. Принимая во внимание, что ![]() ,
функция чувствительности может быть определена через передаточную функцию.
Основная трудность при синтезе таких алгоритмов заключается в определении φ,
так как закон изменения параметров объекта не известен. В случае, когда система
и модель операторно тождественны, то φ можно получить, используя
оператор (передаточную функцию) эталонной модели. Но при этом исключается
возможность выбора ЭМ в виде динамического звена меньшего порядка по сравнению
с объектом управления. В частном случае уравнение адаптора может иметь
вид:
,
функция чувствительности может быть определена через передаточную функцию.
Основная трудность при синтезе таких алгоритмов заключается в определении φ,
так как закон изменения параметров объекта не известен. В случае, когда система
и модель операторно тождественны, то φ можно получить, используя
оператор (передаточную функцию) эталонной модели. Но при этом исключается
возможность выбора ЭМ в виде динамического звена меньшего порядка по сравнению
с объектом управления. В частном случае уравнение адаптора может иметь
вид:
![]() .
.
Объект управления,
эталонная модель, регулятор и адаптор образуют адаптивную систему. Процессы,
наблюдаемые в замкнутой системе при отработке постоянного входного воздействия
единичной амплитуды и ![]() , приведены на рис. 3.3 и 3.4.
Выходной сигнал достигает заданного эталонного значения после окончания
переходного процесса. Точность в установившемся процессе выше в системе со
стационарным объектом (рис. 3.3).
, приведены на рис. 3.3 и 3.4.
Выходной сигнал достигает заданного эталонного значения после окончания
переходного процесса. Точность в установившемся процессе выше в системе со
стационарным объектом (рис. 3.3).
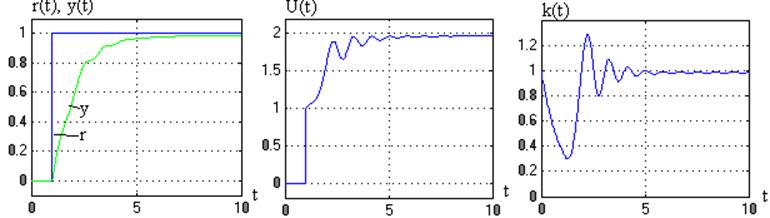
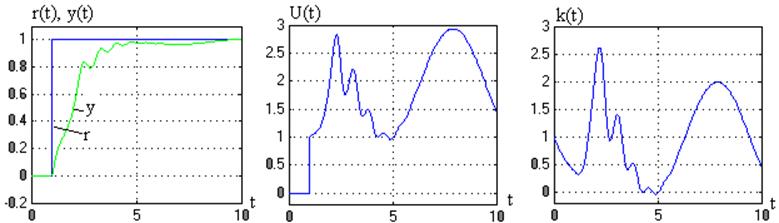
Рис.3.4.
3.2.2 Расчет адаптивного регулятора для объекта n-ого порядка
Проведем синтез адаптивной системы для одноканального линейного объекта управления
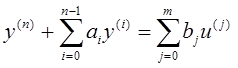 (3.2)
(3.2)
где ![]() –
управляющая и выходная переменные соответственно,
–
управляющая и выходная переменные соответственно, ![]() .
Параметры объекта
.
Параметры объекта ![]() точно не определены, но заданы (n + m + 1) – мерной областью возможных значений Wab. Операторная запись уравнения (3.2)
имеет вид
точно не определены, но заданы (n + m + 1) – мерной областью возможных значений Wab. Операторная запись уравнения (3.2)
имеет вид
![]() (3.3)
(3.3)
где ![]()
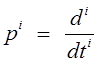 – оператор i- кратного дифференцирования.
Считаем, что в выражении (3.3) полином при управляющем воздействии (
– оператор i- кратного дифференцирования.
Считаем, что в выражении (3.3) полином при управляющем воздействии (![]() ) является устойчивым.
) является устойчивым.
Цель управления зададим предельным соотношением
![]() (3.4)
(3.4)
где ![]() –
эталонная траектория движения, которая удовлетворяет уравнению эталонной модели
–
эталонная траектория движения, которая удовлетворяет уравнению эталонной модели
![]() (3.5)
(3.5)
здесь 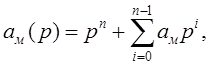
![]() – эталонное входное воздействие на
систему. Полином
– эталонное входное воздействие на
систему. Полином ![]() является устойчивым, т.е. корни
уравнения
является устойчивым, т.е. корни
уравнения ![]() = 0 имеют отрицательную действительную
часть.
= 0 имеют отрицательную действительную
часть.
Для определения структуры
“идеального” закона управления выполним преобразования уравнений (3.2) и
(3.5). Вычтем из обеих частей уравнения (3.3) выражение (![]() ):
):
![]() .
(3.6)
.
(3.6)
Полагая ![]() ,
запишем уравнение (3.5)
,
запишем уравнение (3.5)
![]() (3.7)
(3.7)
Прибавим к обеим частям уравнения
(3.6) выражение (![]() ) :
) :
![]() (3.8)
(3.8)
где 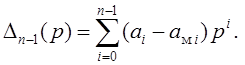 Далее
вычтем из (3.8) уравнение (3.5):
Далее
вычтем из (3.8) уравнение (3.5):
![]() (3.9)
(3.9)
где ![]() . Пусть
“идеальный” закон управления имеет вид
. Пусть
“идеальный” закон управления имеет вид
![]() (3.10)
(3.10)
тогда
![]() (3.11)
(3.11)
Так как полином ![]() является устойчивым по условию, то
является устойчивым по условию, то ![]() при
при ![]() ,
т.е. закон управления (3.10) позволяет обеспечить выполнение цели управления
(3.4). Учитывая, что
,
т.е. закон управления (3.10) позволяет обеспечить выполнение цели управления
(3.4). Учитывая, что ![]() и
и ![]() не
известны, реальный закон управления запишем в виде
не
известны, реальный закон управления запишем в виде
![]() (3.12)
(3.12)
с операторами  Если
в процессе настройки коэффициентов будет выполнено
Если
в процессе настройки коэффициентов будет выполнено ![]() при t®¥ , то e® 0, что соответствует достижению поставленной цели
управления.
при t®¥ , то e® 0, что соответствует достижению поставленной цели
управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.