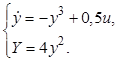
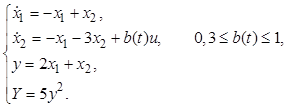
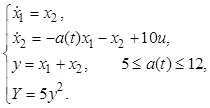
11.3. Поведение объекта описывают уравнения
Рассчитать градиентную систему с
точной оценкой ![]() , если требования к процессу
выхода на экстремум следующие:
, если требования к процессу
выхода на экстремум следующие: ![]() .
.
11.4. Поведение объекта описывают уравнения
Рассчитать градиентную систему с
точной оценкой ![]() , обеспечивающую выход на
экстремум за время
, обеспечивающую выход на
экстремум за время ![]()
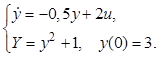
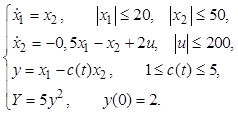
11.5. Модель объекта имеет вид

Рассчитать автоматическую систему с
учетом метода «тяжелого шарика» и точной оценки ![]() ,
обеспечивающую выход на экстремум за время
,
обеспечивающую выход на экстремум за время ![]()
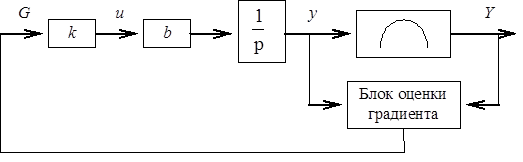
11.6. Структурная схема объекта представлена
на рис. 11.20. Рассчитать систему поиска экстремума с производной в управлении
и точной оценкой ![]() , обеспечивающую время выхода на
экстремум
, обеспечивающую время выхода на
экстремум ![]() Описание динамической части и экстремальной
характеристики имеет вид
Описание динамической части и экстремальной
характеристики имеет вид
11.7. Для объекта, структурная схема
которого представлена на
рис. 11.20, рассчитать систему поиска экстремума с производной в управлении и
точной оценкой ![]() . Описание динамической части и
экстремальной характеристики имеет вид
. Описание динамической части и
экстремальной характеристики имеет вид
Качество процесса выхода на экстремум
должно удовлетворять требованиям: ![]()
11.8. Структурная схема объекта представлена
на рис. 11.20. Рассчитать систему поиска экстремума в предположении, что модель
динамической части и экстремальной характеристики имеет вид ![]() . Необходимо оценить
. Необходимо оценить ![]() способом деления производных и обеспечить
время выхода на экстремум
способом деления производных и обеспечить
время выхода на экстремум ![]()
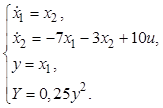
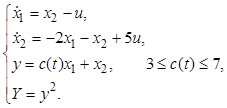
11.9. Поведение объекта описывают уравнения
Рассчитать градиентную систему,
обеспечивающую выход на экстремум за время ![]() Для
оценки
Для
оценки ![]() использовать метод конечных
разностей.
использовать метод конечных
разностей.
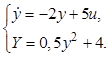
11.10. Поведение объекта описывают уравнения
Рассчитать градиентную систему,
обеспечивающую выход на экстремум за время ![]() Для
оценки
Для
оценки ![]() использовать метод синхронного детектирования.
использовать метод синхронного детектирования.
11.11. Структурная схема объекта представлена
на рис. 11.20. Рассчитать систему поиска экстремума в предположении, что модель
динамической части и экстремальной характеристики имеет вид ![]() . Необходимо оценить
. Необходимо оценить ![]() методом синхронного детектирования и
обеспечить качество процесса выхода на экстремум:
методом синхронного детектирования и
обеспечить качество процесса выхода на экстремум: ![]() .
.
11.12. Структурная схема объекта представлена
на рис. 11.20. Рассчитать систему поиска экстремума с производной в управлении
и реальной оценкой ![]() , обеспечивающую время выхода на
экстремум
, обеспечивающую время выхода на
экстремум ![]() Описание динамической части и
экстремальной характеристики имеет вид
Описание динамической части и
экстремальной характеристики имеет вид
11.13. Поведение объекта описывают уравнения
Рассчитать систему поиска экстремума с
производной в управлении и реальной оценкой ![]() ,
обеспечивающую время выхода на экстремум
,
обеспечивающую время выхода на экстремум ![]()
11.14. Поведение объекта описывают уравнения
Рассчитать
систему поиска экстремума с производной в управлении и реальной оценкой ![]() , обеспечивающую следующее качество процесса
выхода на экстремум:
, обеспечивающую следующее качество процесса
выхода на экстремум: ![]()
Литература
1. Александров А.Г. Оптимальные и адаптивные системы. – М.: Высш. шк., 1989.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1974.
3. Востриков А.С. Управление динамическими объектами: Учеб. пособие. – Новосибирск: НЭТИ, 1979.
4. Востриков А.С. Синтез нелинейных систем методом локализации. – Новосибирск: Изд-во Новосиб. ун-та, 1990.
5. Востриков А.С., Французова Г.А. Экстремальные и оптимальные системы автоматического управления.: Учеб. пособие. – Новосибирск: НГТУ, 2001.
6. Геращенко Е.И., Геращенко С.М. Метод разделения движений и оптимизация нелинейных систем. – М.: Наука, 1975.
7. Иващенко Н.Н. Автоматическое регулирование. М.: Машиностроение, 1978.
8. Изерман Р. Цифровые системы управления: Пер. с англ. – М., 1984.
9. Коновалов Г.Н. Радиоавтоматика: Учеб. для вузов по спец. «Радиотехника». – М.: Высш. шк., 1990.
10. Либерзон Л.М., Родов А.Б. Системы экстремального регулирования // Библиотека по автоматике. Вып. 154. – Л.: Энергия, 1965.
11. Олейников В.А., Зотов Н.С., Пришвин А.М. Основы оптимального и экстремального управления. – М.: Высш. шк., 1969.
12. Растригин Л.А. Системы экстремального регулирования. – М.: Наука, 1974.
13. Чураков Е.П. Оптимальные и адаптивные системы.– М.: Энергоатомиздат, 1987.
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.