Рассмотрим организацию движения к экстремуму на примере простейшего объекта управления, который описывается следующей системой уравнений:
 (11.33)
(11.33)
Сформируем пропорциональный градиенту закон управления в виде
![]() . (11.34)
. (11.34)
Подставив (11.34) в уравнение объекта (11.33), получим уравнение замкнутой системы
![]() , (11.35)
, (11.35)
которое представляет собой нелинейное дифференциальное уравнение
относительно переменной y.
Полагая ![]() , запишем уравнение статики
, запишем уравнение статики
![]() , (11.36)
, (11.36)
где зависимость G от t параметрическая. Поскольку ![]() , из выражения
(11.36) следует
, из выражения
(11.36) следует
![]() . (11.37)
. (11.37)
Таким образом, в случае
устойчивости замкнутой системы процессы в ней будут сходиться к точке
равновесия, которая является точкой экстремума. Устойчивость движения в
замкнутой системе можно обеспечить соответствующим выбором коэффициента усиления
![]() , при этом выход на экстремум происходит
автоматически. В некоторых случаях с помощью коэффициента
, при этом выход на экстремум происходит
автоматически. В некоторых случаях с помощью коэффициента ![]() кроме устойчивости можно обеспечить
определенную длительность переходного процесса в замкнутой системе, т. е.
заданное время выхода на
экстремум.
кроме устойчивости можно обеспечить
определенную длительность переходного процесса в замкнутой системе, т. е.
заданное время выхода на
экстремум.
Пример 11.1
Для объекта, математическая модель которого имеет вид

необходимо
обеспечить выход на экстремум за заданное время ![]() с.
с.
В соответствии с (11.34) сформируем управление
![]() .
.
Так как известна модель статической экстремальной характеристики, градиент можно определить аналитически,
 , и организовать алгоритм управления в виде
, и организовать алгоритм управления в виде
![]() .
.
В этом случае получим уравнение замкнутой системы
![]() .
.
Как
видим, она имеет первый порядок, и для ее устойчивости корень
характеристического уравнения ![]() должен быть отрицательным.
Следовательно, необходимо выбирать коэффициент
должен быть отрицательным.
Следовательно, необходимо выбирать коэффициент
![]() .
.
Численное
значение ![]() определим, используя корневые оценки
переходного процесса. Так как
определим, используя корневые оценки
переходного процесса. Так как ![]() , то получим
, то получим ![]() . Если выбрать
. Если выбрать ![]() , то
алгоритм управления, обеспечивающий выполнение заданных требований, примет вид
, то
алгоритм управления, обеспечивающий выполнение заданных требований, примет вид
![]() .
.
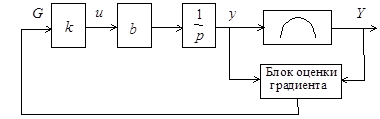
Рис. 11.14. Структурная схема системы для примера 11.1
Структурная схема системы с рассчитанным законом управления представлена на рис. 11.14.
11.7.2. Метод «тяжелого шарика»
Рассмотренный в п. 11.8.2 метод позволяет автоматически найти экстремум, в окрестности которого заданы начальные условия. Если экстремальная характеристика помимо глобального имеет также и несколько локальных экстремумов, то система может «остановиться» в любом из них.
По аналогии с тяжелым шариком, который скатывается в овраг, проскакивая локальные экстремумы, данный метод предполагает введение в систему дополнительной инерционности для придания процессам свойства «проскакивать» точки локальных экстремумов.
Будем рассматривать объект, поведение которого описывают уравнения (11.33). Чтобы обеспечить колебательные переходные процессы в системе, добавим в обратную связь апериодическое звено с постоянной времени T, которую и определим в результате синтеза.
Расчетная структурная схема такой системы приведена на рис. 11.15.
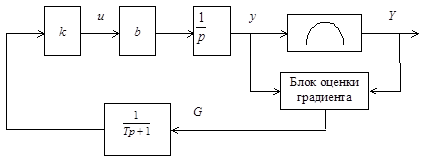
Рис. 11.15. Структурная схема системы с дополнительной инерционностью
Запишем операторное уравнение замкнутой системы, предполагая, что с помощью соответствующего блока градиент можно оценить точно,
 , (11.38)
, (11.38)
где ![]() так как экстремальная характеристика
описывается уравнением
так как экстремальная характеристика
описывается уравнением ![]() .
.
Преобразуем уравнение (11.38) к виду
![]() , которое затем представим в стандартной форме
, которое затем представим в стандартной форме
![]() . (11.39)
. (11.39)
Отсюда следует, что,
выбирая ![]() можно обеспечить устойчивость системы
(11.39), уравнение статики которой имеет вид
можно обеспечить устойчивость системы
(11.39), уравнение статики которой имеет вид
![]() . (11.40)
. (11.40)
Таким образом, точка
равновесия ![]() эквивалентна точке экстремума, так как при
этом
эквивалентна точке экстремума, так как при
этом ![]() .
.
Характер движения системы к точке экстремума определяется характеристическим уравнением
![]() . (11.41)
. (11.41)
Выбирая распределение
корней из условия обеспечения требуемых показателей качества процесса выхода на
экстремум (![]() и
и ![]() ),
сформируем желаемое характеристическое уравнение второго порядка. Приравнивая
коэффициенты при соответствующих степенях оператора pэтих двух уравнений (согласно методике модального
метода синтеза), можно определить требуемые численные значения kи T.
),
сформируем желаемое характеристическое уравнение второго порядка. Приравнивая
коэффициенты при соответствующих степенях оператора pэтих двух уравнений (согласно методике модального
метода синтеза), можно определить требуемые численные значения kи T.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.