Беспоисковые системы с моделью принято делить на системы прямого и непрямого адаптивного управления.
В системах прямого адаптивного управления параметры модели жестко заданы, они не меняются. За счет рассогласования между характеристиками эталонной модели и системой происходит изменение параметров управляющего устройства.
Системы непрямого адаптивного управления содержат настраиваемые модели. Целью является максимально приблизить настраиваемую модель к модели ОУ, а затем коэф-ты настраиваемой модели используются в управляющем устройстве. В данном классе систем нашли применение методы параметрической идентификации.
1. При прямом адаптивном управлении контуры самонастройки работают по замкнутому циклу. В этом случае в системе могут парироваться и изменятся параметры самого регулятора (например, с течением времени может измениться крутизна характеристик датчиков, добротность приводов и т. д). Однако каждый контур самонастройки повышает порядок общей системы и дифференциальных уравнений как минимум на единицу. Контур самонастройки (адаптации) влияет на общую динамику системы. Поэтому для каждого класса систем актуален вопрос устойчивости. Системы обладают хорошим быстродействием контуров адаптации.
2. В системах непрямого адаптивного управления контуры адаптации работают по разомкнутому циклу и, следовательно, не влияют на динамику системы. Однако, все ошибки идентификации, уходы параметров отдельных блоков регулятора, ошибки работы самих контуров адаптации существенно влияют на точность управления. В этом классе систем требования к модели значительно жёстче, чем в случае систем прямого адаптивного управления, когда модель может быть упрощённой (иметь более низкий порядок по сравнению с порядком системы) (таблица 1).
Следует также отметить, что между прямым и непрямым адаптивным управлением существует тесная связь.
Таблица 1
|
№ |
Характеристики |
Системы прямого адаптивного управления |
Системы непрямого адаптивного управления |
|
1 |
Порядок замкнутой системы |
Выше (-) |
Ниже (+) |
|
2 |
Устойчивость |
Требует допол-х исследований (-) |
Не требует дополнитель- ных исследований (+) |
|
3 |
Тип контура адаптации |
замкнутый |
разомкнутый |
|
4 |
Точность работы системы |
Выше (+) |
Ниже (-) |
|
5 |
Быстродействие контура адаптации |
Выше (+) |
Ниже (-) |
|
6 |
Требования к модели |
Ниже (+) |
Выше (-) (модель максимально не совпадает с моделью ОУ) |
На рисунках 1 и 2 приведены структуры систем прямого и не прямого адаптивного управления.
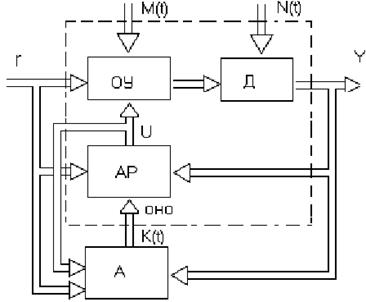
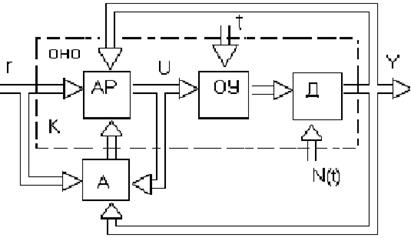 Рисунок 1
Рисунок 1
Рисунок 2
ОУ – объект управления,
Д – датчики,
АР – адаптивный регулятор,
А – адаптор;
V – вектор входных (эталонных) переменных,
Y – вектор выходных переменных системы,
U – вектор управляющих воздействий,
M – вектор внешних возмущений,
К – вектор настраиваемых коэффициентов регулятора,
N – вектор помех измерения.
Введем некоторые рабочие определения:
адаптивный регулятор – управляющее устройство с переменными коэффициентами или переменной структурой,
адаптор – устройство, реализующее алгоритм изменения коэффициентов регулятора (алгоритм адаптации), объект управления с блоком датчиков и регулятор образуют обобщённый настраиваемый объект (ОНО).
Особенность системы, приведенной на рисунке 1, состоит в последовательном с объектом включении регулятора. Такой структурой обладают системы прямого адаптивного управления.
В схеме (рисунок 2) регулятор включен в обратную связь относительно объекта управления. По такой схеме могут быть реализованы, например, системы непрямого адаптивного управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.