Согласно
(4.21) элементы ![]() вектор-функции
вектор-функции ![]() имеют следующий вид:
имеют следующий вид:
 Для
реализации закона управления (4.22) требуется информация о производных выходной
переменной, оценку которых можно получить с помощью дифференцирующих фильтров.
Дифференциальное уравнение ФОП имеет вид:
Для
реализации закона управления (4.22) требуется информация о производных выходной
переменной, оценку которых можно получить с помощью дифференцирующих фильтров.
Дифференциальное уравнение ФОП имеет вид: ![]()
Порядок адаптивной системы равен ![]() где
где ![]() -
порядок адаптивного регулятора,
-
порядок адаптивного регулятора, ![]() , его значение
зависит от количества неизвестных параметров и присутствия внешнего возмущения
в объекте управления.
, его значение
зависит от количества неизвестных параметров и присутствия внешнего возмущения
в объекте управления.
Модель линейного одноканального нестационарного
объекта управления n-го порядка описывается уравнениями вида:  (4.9)
(4.9)
Разложим
параметрические возмущения ![]() в ряд Тейлора с целью
выделения постоянной и переменной составляющей по формуле:
в ряд Тейлора с целью
выделения постоянной и переменной составляющей по формуле:

 (4.11)
(4.11)
Выделим
в (4.11) первые члены разложения: ![]() причем
причем ![]() Получим модифицированную модель объекта:
Получим модифицированную модель объекта:
 (4.13) где
(4.13) где
 здесь
здесь ![]() ,
причем
,
причем ![]() равны либо расчетным номинальным
значениям, либо априори известным верхним оценкам соответствующих
коэффициентов. Используя требования к показателям качества замкнутой системы,
формируем желаемое диф-ное уравнение, того же порядка что порядок уравнения
объекта. Разрешаем относительно старшей производной:
равны либо расчетным номинальным
значениям, либо априори известным верхним оценкам соответствующих
коэффициентов. Используя требования к показателям качества замкнутой системы,
формируем желаемое диф-ное уравнение, того же порядка что порядок уравнения
объекта. Разрешаем относительно старшей производной: ![]() (4,14)
(4,14)
 Приравниваются
правые части (4.13), (4.14), полученное уравнение разрешается отн-но управ.
переменной, после чего выполняется замена неизвестных коэф-тов, также функции
Приравниваются
правые части (4.13), (4.14), полученное уравнение разрешается отн-но управ.
переменной, после чего выполняется замена неизвестных коэф-тов, также функции ![]() соответ-ми коэф-ми регулятора:
соответ-ми коэф-ми регулятора: (4.24) где km(t)
настраивается по алгоритму:
(4.24) где km(t)
настраивается по алгоритму: ![]() , (4.25) где γm –коэф-т
передачи адаптера, lm –
вспомогательная фун-я. С помощью γm и lm достигается поставленная цель управления, т.е. значения γm и lm определяются из условия устойчивости адаптивной системы. Оценка n
производных осуществляется с помощью диф.:
, (4.25) где γm –коэф-т
передачи адаптера, lm –
вспомогательная фун-я. С помощью γm и lm достигается поставленная цель управления, т.е. значения γm и lm определяются из условия устойчивости адаптивной системы. Оценка n
производных осуществляется с помощью диф.: ![]() (2.37)
В пространстве состояния система имеет вид:
(2.37)
В пространстве состояния система имеет вид:
![]() Переменные состояния ФОП выберем следующим
образом:
Переменные состояния ФОП выберем следующим
образом:
 ,
,
Как видно из (4.26), порядок адаптивной
системы с одним контуром адаптации равен ![]() Нетрудно
видеть, что система с сигнальной адаптацией (4.26) может быть также отнесена к
классу робастных систем с астатическим регулятором (астатический регулятор со
старшей производной)
Нетрудно
видеть, что система с сигнальной адаптацией (4.26) может быть также отнесена к
классу робастных систем с астатическим регулятором (астатический регулятор со
старшей производной)
Модель линейного одноканального нестационарного
объекта управления n-го порядка описывается уравнениями вида: (1) Разложим параметрические
возмущения ![]() в ряд Тейлора с целью выделения постоянной
и переменной составляющей.Учтем первые два члена ряда
в ряд Тейлора с целью выделения постоянной
и переменной составляющей.Учтем первые два члена ряда ![]() и
первые члены ряда разложения
и
первые члены ряда разложения ![]() ,
, ![]() . Согласно
. Согласно 
Имеем ![]() где
где ![]() остаточный
член. Примем
остаточный
член. Примем ![]() второй член ряда представляет собой
линейную функцию времени:
второй член ряда представляет собой
линейную функцию времени: ![]() Тогда уравнение
объекта (1) примет вид:
Тогда уравнение
объекта (1) примет вид:
 (2) в которой неизвестная функция M(t) и неизвестный переменный параметр
(2) в которой неизвестная функция M(t) и неизвестный переменный параметр ![]() . Таким образом, на объект действуют
параметрическое и аддитивное возмущения, поэтому метод адаптации будет
сигнально-параметрическим. Используя требования к показателям качества
замкнутой системы, формируем желаемое диф-ное уравнение, того же порядка что
порядок уравнения объекта. Разрешаем относительно старшей производной получаем
описание эталонной модели:
. Таким образом, на объект действуют
параметрическое и аддитивное возмущения, поэтому метод адаптации будет
сигнально-параметрическим. Используя требования к показателям качества
замкнутой системы, формируем желаемое диф-ное уравнение, того же порядка что
порядок уравнения объекта. Разрешаем относительно старшей производной получаем
описание эталонной модели: ![]() (3)
(3)
 Приравниваются правые части (2), (3),
полученное уравнение разрешается отн-но управ. переменной, после чего
выполняется замена неизвестных коэф-тов, также функции
Приравниваются правые части (2), (3),
полученное уравнение разрешается отн-но управ. переменной, после чего
выполняется замена неизвестных коэф-тов, также функции ![]() соответ-ми
коэф-ми регулятора:
соответ-ми
коэф-ми регулятора: 
изменение настраиваемых коэф-тов подчиняются алгоритмам:
 где γm, γa-коэффициенты
передачи адаптера, lm , lа -
вспомогательная функция. Уравнения
системы с сигнально-параметрической адаптацией, записанные в расширенном
пространстве состояний
где γm, γa-коэффициенты
передачи адаптера, lm , lа -
вспомогательная функция. Уравнения
системы с сигнально-параметрической адаптацией, записанные в расширенном
пространстве состояний ![]() имеют вид:
имеют вид:
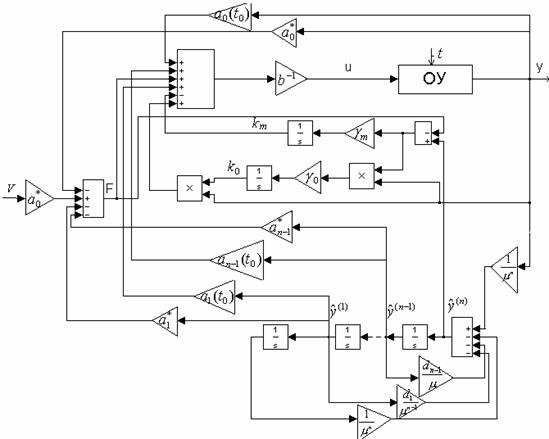 Рисунок
4.11. Структурная схема адаптивной системы с двумя контурами адаптации
Рисунок
4.11. Структурная схема адаптивной системы с двумя контурами адаптации

Рисунок 4.10 Структурная схема адаптивной системы с одним контуром адаптации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.